
PC机与PIC单片机串行通讯的实现
随着计算机应用技术和微机网络技术的发展,计算机与其外部设备之间的数据传输越发显得重要。而串行通讯技术是实现这一功能的有效途径,他具有使用方便、数据传输可靠、适用于远距离通讯的特点,在工业监控、数据采集、检测等系统中有着广泛的应用。
1 异步串行通讯的原理及硬件电路的实现
1.1 异步串行通讯的原理
在异步通讯中,数据是一帧一帧传送的,在帧格式中,一个字符由4部分组成:起始位、数据位、奇偶校验位和停止位。首先是一个起始位"o",然后是5~8位数据(规定低位在前,高位在后),接下来是奇偶校验位(可省略),最后是停止位"1"。起始位"o"信号只占用1 位,用来通知接收设备一个待接收的字符开始到来。线路上在不传送字符时应保持为"广。接收端不断检测线路的状态,若连续为"1"以后又检测到一个"o",就知道发来一个新字符,应马上准备接收。
1.2 硬件电路的实现
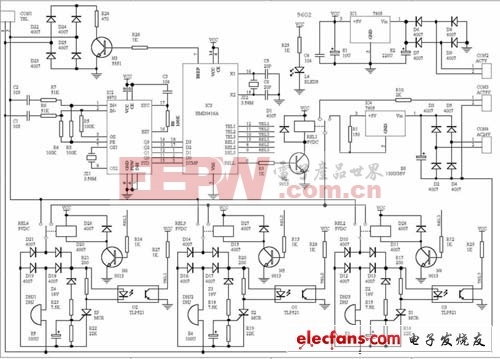
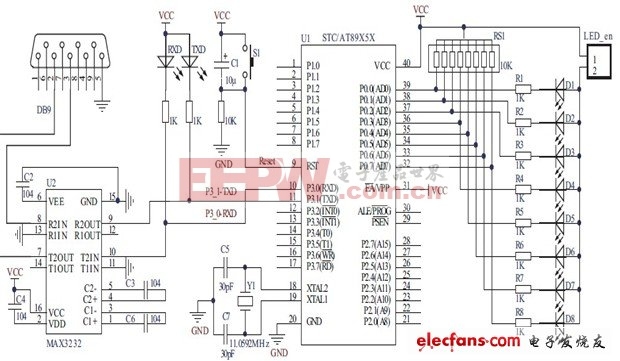
PC机与PICl6C711单片机之间的串行异步通讯采用RS232接口电路实现,利用计算机的串行接口进行数据传输。因为RS232逻辑电子对地是对称的,与TTI。,CMOS逻辑电平完全不同。逻辑"1"电平为一5~15V之间,逻辑电平"0"为+ 5~15V之间,其与单片机的逻辑电平不一致,必须进行电子转换,采用MCl488和MCl489芯片可分别实现TTL-RS232和RS232-TTL 之间的电平转换。接口电路图如图2所示。
2 PC机通讯程序的编制
利用VC++6.0在Windows 98以上的环境下运行,VC实现串行通讯有3种途径:
(1)利用MSComm控件,他是Microsoh公司提供的简化WindOWS串行通讯编程的ActiveX控件,他为应用程序提供了处理串行通讯的2种方法:数据驱动法和查询法;
(2)利用Cseria1Pont类进行串口通讯,他适合于需要使用多个串口时的通讯;
(3)用Win API函数对串口进行操作。
本文以VC++6.0调用Win API函数为例编程实现。Win API函数对串口进行操作不是对端口直接进行读写,而是把所有的设备都看成文件,从而进行相应的文件操作。
第1步,在MainForm.cpp定义全局变量HANDLE hCom;//准备打开的串口的句柄HANDLEh Comm WatchThread;//辅助线程的全局函数
第2步,打开串口,设置串口hCom=CreateFile(〞COMl〞, GENERIC_READ︱GENERIC_WRITE,NULL, OPEN_EXISTING, FILE_ FLAG_OVERLAPPED,NULL);//这里,我们使用FILE_FLAG_OVERLAPPED结构,这正是使用API函数实现非阻塞通讯的关键所在。
ASSERT(hCom! =INVALID HANDLE VALUE);
//检测打开串口操作是否成功
SetCommMask(hCom,EVRXCHAR IEVTXEMPTY);
//设置事件驱动的类型
SetupComm(hCom,1024,512); //设置输入缓冲区的大小
PurgeComm (hCom, PURGE TXABORT ︱ PURGE RXABORT︱PURGETXCLEAR︱PURGE RXCLEAR);
//清理输入输出缓冲区
COMMTIMEOUTS Comm丁imeOuts;
//定义超时结构,井填写该结构
SetCommTimeOuts (hCom,CommTimesOuts);
//设置读写操作所允许的超时
DCB dcb; //设置数据控制快的结构
dcb.BaudRate=9600; //设置波特率
dcb.ByteSze=8;
dcb.StopBits=onestopbit;
dcb.fBinary=TRUE; //二进制通讯格式
dcb.fPar北y:FALSE;
SetCommState(Hcom,dcb) //串口参数配置
第3步,启动一个辅助线程,用于串口事件的处理。这里用他来监视串口状态,主线程则可专心进行数据处理。
HCommWatchThread =CreateThread ((LPSECURITY_ATTRIBUTES) NULL, (LPTHEARD_ START - ROUTINE) CommWatchPROC, GetSafeHwnd ( ),dwThreadID);
ASSERT(hCommWatchThread! =NULL);
第4步,要为辅助线程写一个全局函数,主要完成数据接收的工作。
UNIT CommWatchProc(HWND hSendWnd)
{DWORD dwEvtMask=0;
SetCommMask(hCom,EV_RXCHAR︱EV_ _TXEMPTY);
//有哪些串口事件需要监视
WaitCommEvent(hCom,dwEvMask,Os);
//等待串口通讯事件的发生
If(dwEvtMaskEV_RXCHAR)= =EV_RXCHAR)
//缓冲区中有数据到达
{COMSTART ComStari;
DWORD dwLenlgth;
ClearCommError(hCom,dwErrorFlags,ComStart);
DwLength=ComStat.cbInQuei ; //输入缓冲区有多少数据
If(dwLenlTth>0)
{BOOL fReadStari
fReadStat = =ReadFile (hCom, 1pBuffer,dwLength,
dwBytesRead,,Read_OS(npTTYInfO));
//读数据因为使用1pOverlapped结构,ReadFile()立即返回
FALSE;
If(! fReadStat)
{if(GetLastError()= =ERROR_IO_PENDIN)
{while (! GetOverLappedReault (hCom,READ_OS
(opTTYInfo),dwNytesRead,TRUE)
{dWError=GetlastError();
if(dwError==ERROR_IO_INCOMPLETE)
CONTINUE; //缓冲区数据没有读完,继续
……}
∷ PostMessage (( HWND ) hSendWnd, WM
NOTIFYPROCESS,0,0); //通知主线程,串口接到数据}
第5步,在主线程中发送下行命令:
BOOL f WriteStat;
Char szBuffer[count];
//准备好发送的数据,放在szBuffer[]中
FWrirteStar=WriteFile(hCom,szBuffer,dwbytesToWrite,
dwBytesWrittenWRITE_OS(npTTYInof));
int err=GetLastError();
if(!fWriteStat){if(GetLastError()= =ERROR_IO_PENDING)
{while (! GetOverlappedResult (hCom,WRITE OS
(npTTYInfO),dwBytesWritten,true))
{dwError=GetLasrError();
if(dwError= =ERROR_IO_INCOMPLETE)
{dwBytesSent+=dwbytesWritten;
continue;))}}
3 PIC"C711单片机串行通讯的实现
本文以单片机对温度传感器DSl820进行数据采集为例,实现单片机与PC机的通讯。限于篇幅,给出传送一个DSl820信号到串口的主要部分程序:
A2 EQU 2 //RA2接收数据端
A1 EQU 1 //RAl发送数据
RCVREG EQU 26
R-COUNT EQU 27 //接收数据计数器
T-COUNT EQU 28 //发送数据计数器
MSB EQU 7
NUM EQU 6B //设置下位机序号67
NUM-ADDR EQU 2A //存储本机号码的地址
SEN-CODE EQU 39 //传感器信号存放地址
MAIN CALL SUB-INIT //初始化程序
CALL SUB-REC //调用接收子程序
CALL SUB_ COMP //对接收的数据进行处理
CALL
SUB_TRANS //发送数据子程序
GOTO
EXIT
SUB_INITCLRF RA
BCF STATUS,RP0
MOVLW B'00001101' //初始化MOVWF
TRISA
MOVLW NUM
MOVWF NUM
RETURN
SUB-REC
RCVR BTFSCRA,A2 //检测起始位
GOTO RCVR // 未检测到
MOVL W2 //接收的数据位数
MOVWF R_COUN
R_NEXTCALL DELAY //调用延时程序
BCF STATUS,C
RRF RCVREG
BTFSC RA,A2
BSF RCVREG,MSB
CALL DELAY
DECFSZ R_COUNT
GOTO R_NEXT
RETURN
SUB_COMPMOVLW 6A
MOVWF CONT
MOVFCONT,W
XORWF NUM_ADDR,1 MOVLW
1 ;
ADDWF NUM_ADDR,1 DECFSZ
NUM-ADDR,1
GOTO EXIT
NOP
OVERNOP
RETURN
SUB_TRANSMOVLW 3 //发送的数据位数
MOVWF T_ COUNT
MOVLW 2A
MOVWF SEN_CODE
BCF RA,A1 //设置发送起始位0
T_NEXTCALL DELAY
RRF SEN_CODE
BTFSC STATUS,C
BSF RA,A1 //发送数据位"1"
BTFSS STATUS,C
BCF RA,A1 //发送数据位"0"
DECFS2T_COUNT
GOTO T_NEXT
CALL DELAY
BSF RA,A1 //发送停止位
RETURN
EXITNOP
END
4 结 语
本文所论述的通讯方法曾在对气体传感的在线检测中应用,由于DSl820为数字传感器,因此利用单片机可直接对 DSl820操作,将温度值存储在单片机通用寄存器中,通过VC调用WinAPI函数对串口读写,可将温度值及气体传感器信号采集到PC机界面,从而实现对气体传感器在不同温度值下的在线检测。实践证明,利用VC开发通讯系统,从底层到上层直接面向用户,具有很强的调试功能,采用文中所述的方式构建的通讯在线检测系统工作稳定,数据传输可靠。





评论