
机器人示教盒系统的设计
3.示教盒的硬件设计
示教盒的硬件结构实质上是以8031芯片为核心的单片机系统,其结构如图2所示。
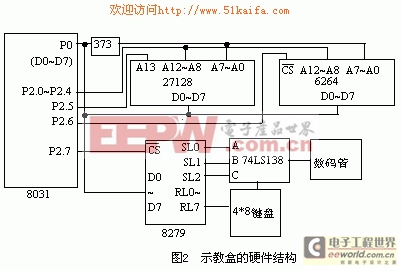
电路是以8031为核心,程序存放在只读程序存储器27128中,地址范围:0000H~3FFFH,数据存放在数据存储器6264中,地址范围是:4000H~5FFFH, 8279芯片的口地址为:8000H,8001H,由它完成命令输入与显示,显示稳定,程序简单,不会出现误动作,接6个数码管和1个米字管,采用米字管显示X、Y、Z,W等数码管不能显示的字符。
4.示教盒的软件设计
4.1 软件模块结构图
示教盒的软件总体框架如图3所示。

开机后,进行8279芯片、串行通讯的初始化,初始化成功后显示Whman_1提示信息,随后可进行三种模式的选取:示教模式、工作模式、再现模式。在示教模式下主要完成对机器人的示教操作。可在关节坐标系和直角坐标系下示教,并可随时进行两种坐标空间的切换,示教模块的输出为规定机器人再现运动方式的指令文件和记录示教点位置信息的位置文件;再现模式主要完成机器人的再现操作;进入工作模式后选择任务号,机器人毋须人工干预自动工作。
4.2显示部分的软件设计
显示部分的软件分为两类:一般显示和坐标连续显示。
4.2.1一般显示
操作者在通过示教盒操作机器人时,示教盒的显示区应显示相应的提示信息,供操作者参考。在该类显示子程序设计中,先将显示指针指向显示缓冲区的首址,要显示字符的个数,地址信息分别送给寄存器(如R1,R2),每显示一个字符后,显示计数器减一,显示地址加一,然后送下一个数码。
4.2.2坐标连续显示
进行示教时,当按下某一坐标键后(不释放),机器人末端执行器连续运动,到所需的位置后,再释放该键,机器人停止运动。在这整个过程中数码管需不断更新显示相应坐标的位置数据。在这类显示子程序中,设定最多能显示5位位置数据,用20h, 21h, 22h, 23h, 24h 分别存放个位,十位,百位,千位,万位显示指针所指向的显示缓冲区的地址,显示缓冲区存放的是0~9的显示码。8279芯片设置为FIFO/传感器RAM 工作方式。











评论