
机器人示教盒系统的设计
1 引言
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。美国机器人学会定义机器人为:一个可再编程,多功能的机械手,他通过各种可改变程序的运动来完成不同的工作任务。为推动我校机器人教学,特进行教学机器人的研制。大多数传统机器人一般采用如下的三种方式编程:(1)示教盒直接示教编程。(2)间接示教编程(即牵引示教编程)。(3)离线编程。我们所研制的教学机器人采用示教盒编程,具有5自由度。为提高机器人的运动和定位精度,采用了小步距角的步进电机并辅以高精度的传动机构。
2.机器人控制系统体系结构
控制系统是机器人的重要组成部分,它是一种典型的多轴实时运动控制系统,其作用是支配执行机构按所需的顺序,沿规定的位置或轨迹运动。该控制系统的硬件包括主机,运动控制卡,驱动器,运动电机,示教盒等。其结构如图1所示。
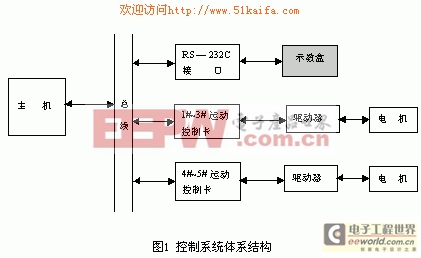
主机采用Pentinum III的PC机,运动控制卡采用北京东方嘉志6020系列的步进电机控制卡,一块控制卡可控制3个步进电机,研制的机器人为5自由度,需5个步进电机,因此采用两块控制卡。控制卡向驱动器输出电机驱动信号,报警等控制信号,驱动器的作用是将控制信号放大,以驱动步进电机运动。
所研制的示教盒是机器人和操作者人机交互的工具,类似于PC机的键盘并具有一定的显示功能。由盒体、键盘、显示屏、控制电路等组成。示教盒面板上有32个键:数字键和功能键。按键采用轻巧超薄的薄膜开关,操纵者通过键盘输入任何信息。如:功能选取、坐标切换、各种运动指令等。显示屏采用一个“米”字管和6 个数码管,用以显示各种提示信息,坐标位置信息,状态信息。示教盒与主机间采用RS—232C标准串口进行通讯。











评论