
基于Atmel单片机的智能泊车方案设计
1.5 光源引导电路设计
本设计采用光敏三极管作为光源检测传感器,因为其感光电压变化明显(电压值变化在60~100mV 左右),价格便宜。光源引导模块需要在小车前方安装3个光敏三极管,通过车库发出的光源信号来引导小车到指定车库停车,使用LM324作为光源引导模块的核心放大器件,将信号进行放大处理。
1.6 停车场系统设计
为了更好地完成小车避障、光源引导和入库过程,停车场系统设计也是十分重要的。停车场系统设计图如图2所示。
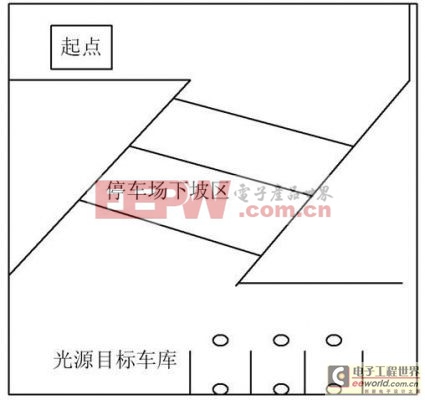
图2停车场系统设计图
2 软件设计
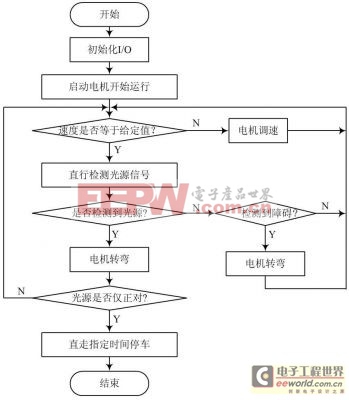
系统软件设计在Keil C51 集成开发环境下进行。软件主要包括系统主程序、避障子程序、光源引导子程序和测速限速子程序等。泊车系统整体流程如图3所示,避障程序流程图、光源引导程序流程图分别如图4,图5所示。测速限速电路软件设计思路是将每圈的时间换算成速度,再与设定的速度比较,如果所测速度大于设定值,则控制电机减速到设定值;如果所测速度小于设定值,则控制电机加速到设定值,完成小车的智能限速。
3 各模块测试及连接
各模块连接:小车舵机左转输入端接P3.4;小车舵机右转输入端接P3.5;小车驱动电机前进输入端接P3.6;小车驱动电机后退输入端接P3.7;光电避障模块左传感器输出端接P1.0;光电避障模块右传感器输出端接P1.1;光源引导模块左传感器输出端接P1.2;光源引导模块中间传感器输出端接P1.3;光源引导模块右传感器输出端接P1.4。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理









评论