
PIC单片机捕捉模块的设计思路
CCP模块可工作在3种模式下:捕捉方式、比较方式和脉宽调制方式。
· 捕捉方式是指检测引脚上输入信号的状态,当信号的状态符合设定的条件时(信号上升沿或下降沿出现时)产生中断,并记录当时的定时器/计数器值,当CCP模块工作在捕捉方式时,TMR1控制寄存器必须工作在定时器或同步计数方式下。
· 比较方式是指将事先设定好的值与定时器方式或同步计数方式下的值相互比较,当两个值相等时,产生中断并驱动事先设定好的动作。
· 脉宽调制功能适用于从引脚上输出脉冲宽度随时可调的PWM信号,来实玑直流电机的调速、D/A转换和步进电机的步进控制。
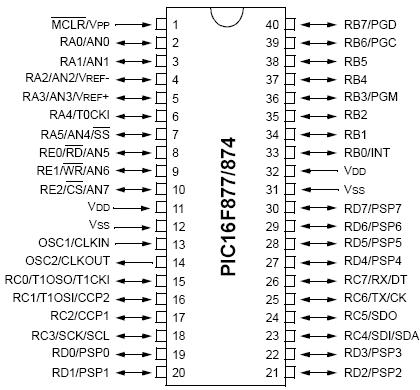
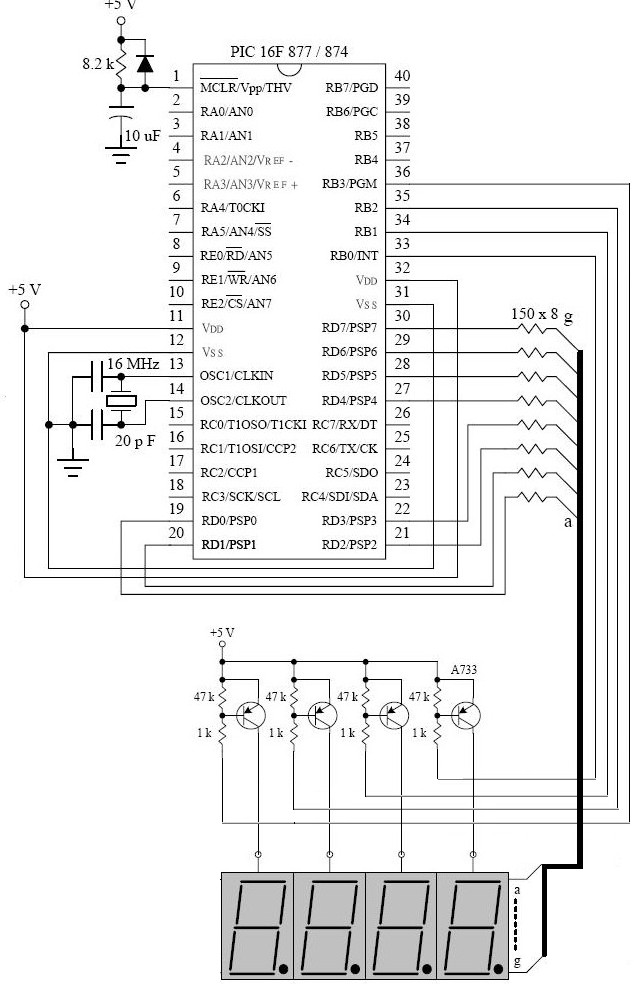
本设计应用PIC16F877单片机的CCP模块的捕获工作方式进行频率计的设计,具体设计要求如下。
测量对象为100~1000Hz的TTL电平信号,待测量的参数有:
· 频率,测量误差小于0.1%;
· 周期,测量误差小于0.1%;
· 脉冲宽度(高电平持续时间),脉冲宽度大于100μs,测量误差小于1%;
· 占空比,占空比的变化范围为10%~90%,测量误差小于1%。
频率计的设计原理如下。
在t1时刻之前把CCP1设置为捕捉脉冲上升沿。当信号上升沿到来时,产生CCP中断,在中断服务程序中捕捉该时刻TMR1寄存器中16位的值time1,将CCP1设置为捕捉脉冲的下降沿。
当该信号下降沿到来时,产生CPP中断,在中断服务程序中捕捉该时刻TMR1寄存器中16位的值time2,而后再把CCP1设置为捕捉脉冲的上升沿。
当信号的下一个上升沿来到时,又产生CCP中断,在中断服务程序中捕捉此刻TMR1寄存器中的16位的值time3,则信号的周期T=(time3-time1)μS,信号频率f=1/T,脉冲宽度P=(time2-time1)μS,占空比D=P/T×100%。
考虑到CCP捕捉方式可能发生的最大误差为±1μs,为满足误差要求,可把上述过程多进行几次,将各次测试的平均值作为最后的测量值。
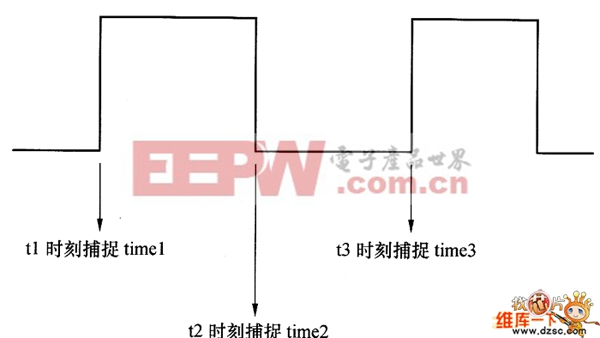
图 频率计设计原理示意图
如果需要测量的最高频率为1000Hz,周期只有1000μs,且占空比的变化范围为10%~90%,则高低电平持续的最短时间都为100μs,可以有充分的时间执行中断服务程序。
如果实际应用中发现两次捕捉中断的时间间隔小于1次中断服务时间,则可以通过适当设置寄存器CCPICON的值,使CCP模块每4个脉冲上升沿捕捉1次或每16个脉冲上升沿捕捉一次,这样两次中断的时间间隔就增大了。如果还不能达到要求,则可用分频器对输入频率信号分频处理后,再由CCP1引脚输入。




评论