
与通用集成电路相比,ASIC芯片具有体积小、重量轻、功耗低、可靠性高等几个方面的优势,而且在大批量应用时,可降低成本。现场可编程门阵列(FPGA)是在专用ASIC的基础上发展出来的,它克服了专用ASIC不够灵活的缺点。与其他中小规模集成电路相比,其优点主要在于它有很强的灵活性,即其内部的具体逻辑功能可以根据需要配置,对电路的修改和维护很方便。DSP+FPGA结构最大的特点是结构灵活,有较强的通用性,适于模块化设计,从而能够提高算法效率;同时其开发周期较短,系统易于维护和扩展,适合于实时数字信号处理。本文介绍的就是一种可以应用于军事侦察的红外动目标识别跟踪系统的设计。
设计任务及要求
红外动目标跟踪与识别系统的输入信号是红外摄像机提供的模拟或数字视频信号。该系统通过基于C6X系列高速DSP的数字视频处理卡,实时的处理红外数字视频序列,完成对运动目标的搜索、捕获、跟踪、记忆;并且在PC上实时显示红外视频图像,实时给出运动目标的空间坐标,产生运动目标区域的特征数据,完成运动目标区域图像的实时存储或远程传输。硬件模块需要为系统功能的实现提供硬件支持,即提供与系统功能相适应的底层物理支持,包括运算处理速度、存储容量等。
模拟视频数字化精度要求:AD精度为8bit;数字视频通道的要求:按RS422传输协议接收数据,像素精度14bit;每场图像处理时间<40ms;搜索到捕获时间:0.2~1s;捕获到跟踪时间<120ms;25帧/s实时识别、跟踪运动目标(即当前场数据必须在下一场数据到来之前处理完毕,并由计算机输出处理结果,显示视频图像),并给出目标位置及领域图像;与计算机的接口为PCI接口。
系统总体设计
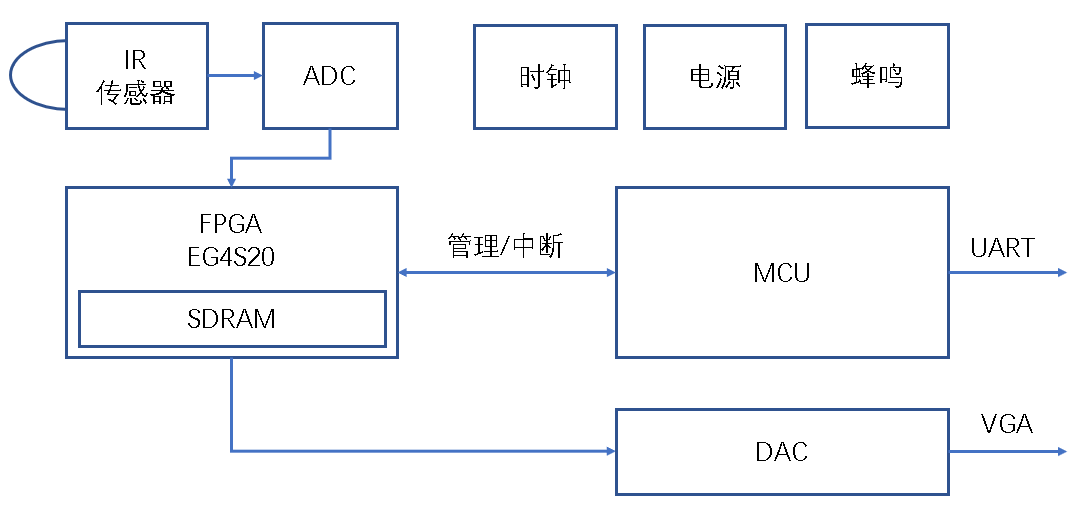
根据设计任务和系统要求,本系统大致可分为四个模块(见图1)。
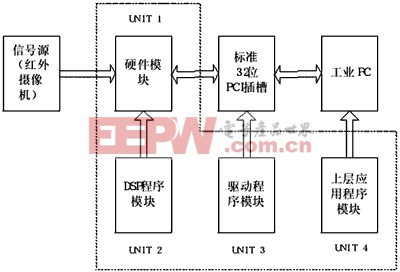
图1系统模块组成
UNIT 1模块基于标准32位+5V的PCI总线,并配以超大规模可编程芯片(DSP,FPGA),具有极强的运算、处理能力。
UNIT 2模块的功能主要实现是运动背景下的动目标检测、跟踪。考虑到系统的实时性要求,运动背景下的动目标检测采用基于摄像机运动补偿的差分技术。首先对摄像机运动造成的全局运动进行补偿,对补偿后的序列图像进行差分运算;然后在差分域搜索目标运动引起的运动扰动区域;最后在原视频图像上分割提取运动目标。同时,采用预测技术对目标的可能位置和存在区域进行估计,以实现实时、准确跟踪(或记忆)目标。系统软件按照其工作状态分为四个状态模块:搜索、捕获、跟踪、记忆跟踪。系统按照搜索、捕获、跟踪、记忆跟踪四个状态及其转换运行,以实现运动目标的实时检测与跟踪。
UNIT 3模块的主要功能是实现硬件模块与上层应用程序的数据通信与信息交互。系统采用了PCI 9054 Target方式的单周期读/写;在图像数据传送的时候为了满足每秒25帧图像的实时传送和处理的要求,采用了PCI 9054的Scatter/Gather DMA方式的数据传输。在整个系统的信息交互中,采用了一次握手协议,也就是请求一一应答协议。
UNIT 4模块的主要功能是向硬件模块下载DSP跟踪程序,启动/停止DSP,实时显示场景视频,对运动目标序列进行实时存储,对运动目标序列的基本特性进行实时分析和结果的显示。
系统硬件设计
系统硬件原理框图如图2所示,为了设计和描述的方便,我们把硬件模块的电路结构划分为以下几个单元:视频接口单元、输入输出FIFO视频图像存储器、数字图像处理单元(DSP)、可编程控制器、与PC的PCI接口电路等。
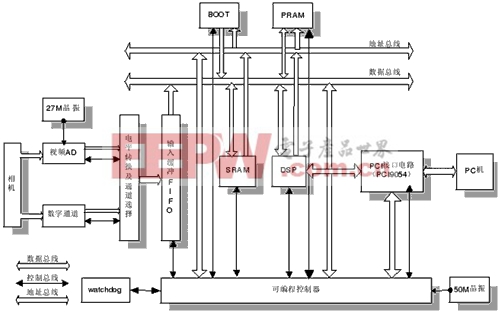
图2系统硬件原理框图
1视频接口单元
红外运动目标识别与跟踪系统的视频源是红外摄像机提供的视频信号。红外摄像机有两路视频输出,即模拟视频输出和数字视频输出。本系统要求硬件模块对两路视频信号都能够进行处理。因此,必须对输入视频信号进行预处理,为数字图像处理单元(DSP)提供必要的视频数据和视频同步数据。视频接口单元框图如图3所示。




评论