
基于ATmega8的大功率直流电机控制系统设计与实现
一、前言
直流电动机作为主要的机电能量转换的装置,广泛应用于各行各业。随着计算机电子技术的迅猛发展,电动机的控制方法也发生了巨大的变化,模拟控制方法已基本被数字控制方法所取代。本系统采用ATmega8单片机为核心控制器,通过PWM波来控制H桥中MOSFET器件的导通和关断,把直流电压变成电压脉冲列,控制电压脉冲的宽度或周期,将26V直流电变为交流电在在通过变压器将升压到180V在整流获得的,其中还将用PWM控制技术来控制直流电动机的转速。
二、系统硬件设计
(一)系统工作原理
系统控制器主要采用的是ATmega8单片机为控制芯片。通过霍尔传感器检测电流,光电编码器对速度进行检测。在通过单片机产生PWM波来控制H桥的MOSFET,对MOSFET的驱动我们采用互补式的隔离脉冲变压器驱动。将直流电逆变为交流电在通过变压器将26V的直流升压到180V的电压。对电机的控制我们采用的是双闭环调速系统。
(二)主要硬件设计
1、双闭环控制器电路
根据自动控制原理,反馈控制的闭环系统是按被调量的偏差进行控制的系统,如果被调量发生偏差,整个系统就会自动产生纠正偏差的作用。在本系统的设计中,采用比例积分调节算法,双闭环负反馈系统,分别为电流PI调节和转速PI调节算法。通过程序计算出电流环输出电压值,将电枢电压值作为PWM波形占空比的设定值,AVR单片机输出PWM波形,为了防止反馈控制的闭环调速系统在启动和堵转时电枢电流过大的问题,引入了电流截止负反馈环节。为了很好的得到输入信号,我们运用软件程序设计增加了一个卡尔曼滤波。卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
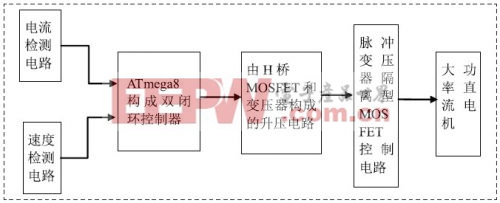
图1 由ATmega8构成的大功率直流电机控制器
2、PWM整形和MOSFET驱动电路
利用74HC74的特性可以得到U1002的SD和RD都接高电平,让PWM信号接CLICK端。当PWM处于由高电平时,由于74HC74的D端接的是Q非端,所以在PWM由低电平转换为高时Q和Q非的输出波形就交替变换,从而将一路的PWM分频为两路的PWM。这两路方波信号分别接到两个与非门的输入端,与非门的另外两个端口相联后在单片机产生的PWM信号相接,当PWM为低电平是两个与非门的输出都为高电平,从而使得最后四路PWM输出都为低电平,完成了驱动MOSFET的死区功能。当CLICK处于上升沿的时候Q和Q非端的输出端也交替的输出高低电平。从而将较低频率的PWM信号通过500KHz的载波信号通过脉冲变压器进行传输。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理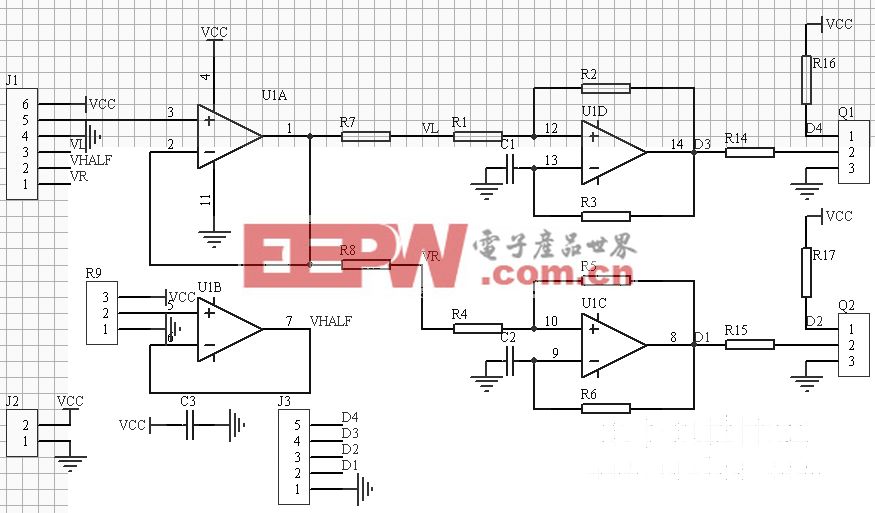



评论