
基于Lab Windows/CVI的PC与 DSP的串行通信
随着数字信号处理理论及微电子技术的高速发展,数字信号处理器(DSP)已广泛应用于各个控制领域。而在控制系统中,通常会利用PC机与DSP之间的通信来对系统各个状态/参数进行监控。这种方法既利用了DSP功耗低、价格相对便宜、功能强大、抗干扰能力强、适宜于分布现场等优点,同时又结合了PC机的软硬件资源丰富、管理功能强大、人机界面友好、操控平台稳定可靠、数据通信方便快捷等系统功能优势。为此,本文拟通过使用比较广泛的RS-232-C接口标准来研究PC与TMS320F2812 DSP之间的异步串行通信。
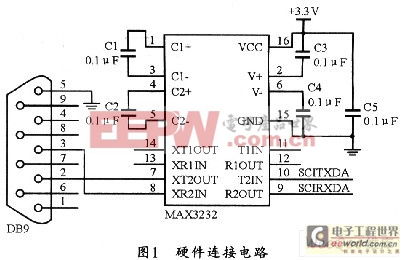
1 硬件设计
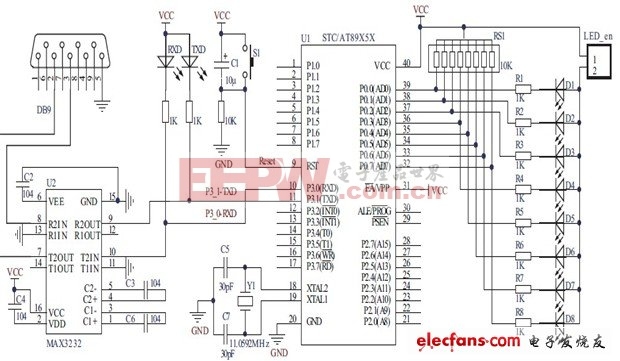
这里采用最简单的三线连接方法,即PC机与DSP的发送、接收端彼此交叉连接,地线对应连接的方法。另外,由于DSP的串行通信接口SCI的两个外部引脚SCITXD和SCIRXD的信号为TTL电平,与RS-232-C标准逻辑电平不一致,因此,要进行信号电平转换后才能连接到PC机的串口接头DB9,图1所示是其硬件连接电路,其中电平转换选用MAX3232芯片和若干电容来实现,使用时只用其中的一对收/发单元。
2 软件设计
2.1 通信协议
本设计将通信的帧格式设置为1个起始位,8个数据位,无奇偶校验位,1个停止位。图2所示为其数据帧格式,其传输波特率为9600 bps,采用全双工通信方法。

PC机发送数据包的格式是:包头+功能码+参数码+数据内容+校验和,本设计分别设置它们占1、2、2、4、4个字节。其中包头是一个数据包开始的标志,这里设置为字符’~’;功能码表示本次通信要完成的操作,其中”01”表示向DSP发送参数,”02”表示让DSP回传数据;参数码表示通信传送的数据类别,”01”表示要传送P参数,”02”表示要传送I参数,”03”表示要传送D参数。假如通过PC机来设置DSP中数字PID控制程序的参数P为15.20,可以设定数据的量纲为1:100,那么就应当发送15.20×100=1520=05F0H,即依次发送字符’0’=30H、’5’=35H、’F’=46H、’0’=30H;且在前面发送的字符串为”~010105F0”。校验和的计算是把从功能码到数据内容己经转换为ASCII码的全部字节连续累加,其值为7EH+30H+31H+30H+31H+30H+35H+46H+30H=021BH,所以,PC向DSP发送完整的数据包为字符串”~010105F0021B”,其格式如图3所示。
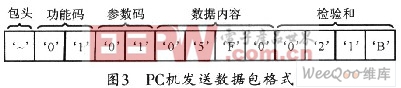
DSP上传电流、电压、频率等实时数据的数据包格式与图3类似,但它可以不使用功能码或参数码。如频率数据包的包头采用字符’*’,电流数据包的包头采用字符’#’,以示区别即可。
2.2 上位机PC端程序
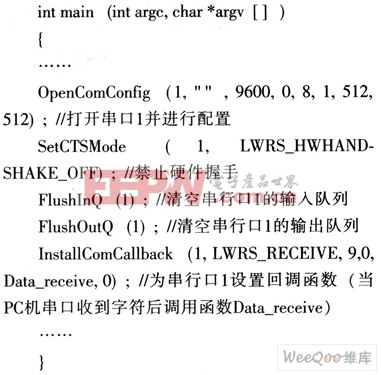
PC机主要完成三部分工作:一是对从机进行控制(比如修改参数),二是对从机采集的数据进行处理和数值计算,三是向用户提供友好、美观的仪器界面。以上功能均可依靠软件实现。上位机软件既可以使用Visual C++、VisualBasic等通用的开发工具,也可以使用LabWin-dows/CVI、LabView等专用于计算机测控领域的虚拟仪器软件开发平台。LabWindows/CVI是NI公司开发的32位、以ANSI C为核心的交互式虚拟仪器开发环境,它将功能强大的C语言与测试技术相结合,具有灵活的交互式编程方法和丰富的库函数,可为开发人员建立监测、自动测试、数据采集、过程监控等系统提供理想的软件开发环境,是实现虚拟仪器及网络化仪器的快速途径。由于其简单易学,故可大大缩短开发周期。LabWindows/CVI具有专门用于RS-232串行通信的函数库,主要包括:串行口打开/关闭函数(OpenCom/OpenComConfig和CloseCom)、串行口输入/输出函数(ComRd、ComRdByte、ComWrt、ComWrtByte)、串行口控制函数(FlushInQ、FlushOutQ)、串行口状态查询函数(GetInQLen、GetOutQLen)、串行口事件处理函数(InstallCom-Callback)等5大类。以下是程序部分代码:
主函数:
PC机发送程序:

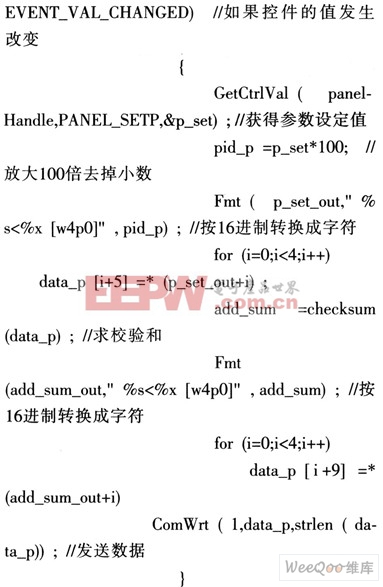
PC机要能向DSP发送控制命令,比如开机,关机,修改参数等,下面以修改PID控制参数P为例。

pid控制相关文章:pid控制原理
c++相关文章:c++教程
通信相关文章:通信原理
pid控制器相关文章:pid控制器原理



评论