
为低功耗应用选择正确的uC外围器件
看门狗定时器监视故障情况。虽然在典型的嵌入式应用中,内嵌的系统程序器往往禁用看门狗定时器,但是在低功耗系统中,在电源电压不稳定的情况下,看门狗定时器是一种有用的工具。看门狗定时器会执行预先设定功能,例如在符合某些条件时,比如电压过低或有内存问题时,向处理器发出 RESET 指令。所选择的处理器应该能够生成已知的 ISR,使处理器无需执行 RESET 而恢复联机状态;因为执行 RESET,必须启动外围设备,因而会消耗更多的处理器功率。
UART 通信
将一个数字时钟与另一个数字时钟精确到秒地同步是不可能的,因为每个时钟均与其内部晶体同步。在 MCU 驱动的系统中,低功耗模式下使用的 32kHz 实时时钟晶体与用于生成UART 波特率的普通 38.4kHz 频率之间会出现类似的同步问题。因为实时时钟的 32,768 频率使 15 位寄存器每秒溢出一次,所以非常适合时间保持(TIme-keeping) 应用。比较而言,在UART 中使用相同的频率,则在典型的 10 位(起始位、8 位数据和 1 个奇偶校验位)传输中保证至少有一位读取不正确。这是由于 32,768Hz 时钟必须除以 3.4,才能得到 9,600 波特率。由于没有 3.4 这一选择,因此必须选择除以 3 或除以 4(参见图2)。
将一个数字时钟与另一个数字时钟精确到秒地同步是不可能的,因为每个时钟均与其内部晶体同步。在 MCU 驱动的系统中,低功耗模式下使用的 32kHz 实时时钟晶体与用于生成UART 波特率的普通 38.4kHz 频率之间会出现类似的同步问题。因为实时时钟的 32,768 频率使 15 位寄存器每秒溢出一次,所以非常适合时间保持(time-keeping) 应用。比较而言,在UART 中使用相同的频率,则在典型的 10 位(起始位、8 位数据和 1 个奇偶校验位)传输中保证至少有一位读取不正确。这是由于 32,768Hz 时钟必须除以 3.4,才能得到 9,600 波特率。由于没有 3.4 这一选择,因此必须选择除以 3 或除以 4(参见图2)。
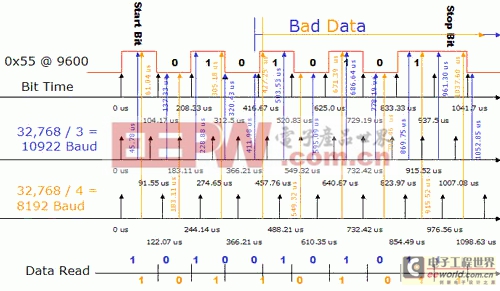
图 2:9600 波特传输时 32Khz 驱动 UART Rx 错误
UART 数据用 10,922 波特或 8,192 波特的 UART 接收。由于 UART 在传输中间点对数据进行采样以补偿抖动,因此该点已经被选择为接收 UART 的采样点。在没有行抖动的理想情况下,10,922 波特 UART 对第三数据位的开始两次读数都会是错误的而8,192 波特的UART 由于会完全遗漏第三位,很快就将出错。由于低功耗应用的理想时钟是低功耗实时时钟模式,这使得在低功耗环境中处理很困难。解决这一问题的最好办法就是将 µC 与调制技术结合使用,用 32kHz 振荡器提供非常精确的 2,400 波特,并完全能支持9,600 波特(参见图 3)。
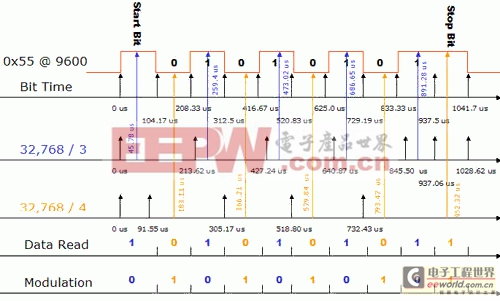
图 3:在 9600 波特传输时采用时钟调制的 32Khz 驱动 UART
通过混合两个时钟除数解决错误,总体积累的错误消失,数据接收正确。这种方法对于9,600 波特或以下的 UART 通信很有效。对于高速通信,几个 µC 监视 UART Rx 行的边缘跃迁并触发 ISR 启动内部高速振荡器,驱动 CPU 并处理中断。这使 µC UART 能够接收高速数据,而不必在 UART 空闲期间保持一个启动的高速时钟。如果使用外部振荡器或内部振荡器频率太低,则由于启动高速振荡器需要一定的时间,第一次传输将失效。为克服这一限制和效率损失,设计人员应该考虑使用能够唤醒并及时从 32kHz 或停机模式激活的处理器,从正在传输的 UART 恢复首次传输的数据。例如,系统时钟需要在 25µs 内启动,才能拾取起始位的中间点,从而正确接收 19,200 位的传输。
许多低功耗应用通过 UART 将 µC 连接到 RS-485 传感器网络。支持寻址和多处理器(9 位)模式的 UART 非常适合于这种网络。当第 9 位为 1(代表是一个地址)时,这些 UART 会生成一个 ISR,让处理器能够在其它传感器通过系统发送数据时保持休眠状态。某些 µC 会更进一步,在 UART 中加入地址匹配,仅在第 9 位是 1 且地址与在剩余 8 位中收到的数据匹配时才唤醒系统。
模拟器件
模拟器件模拟器件是最早的操作器件。模拟器件已经发展数十年,它是稳定电源、为高速晶体电路提供过滤和稳定性的必要器件,对监控来自自然界的输入信号也必不可少。
模拟器件模拟器件是最早的操作器件。模拟器件已经发展数十年,它是稳定电源、为高速晶体电路提供过滤和稳定性的必要器件,对监控来自自然界的输入信号也必不可少。
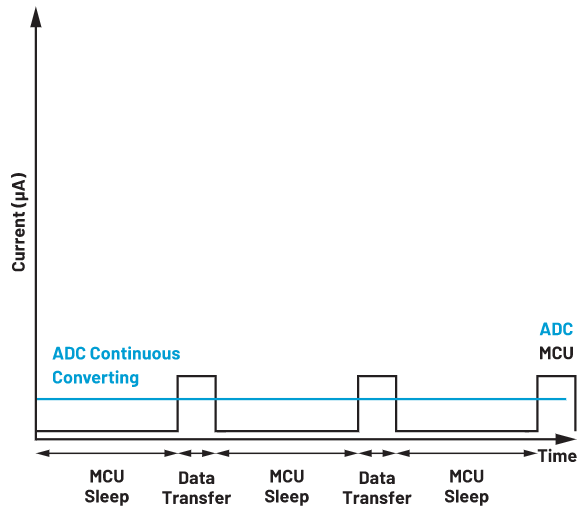
在待机模式下,模拟器件实际上不消耗功率。模拟-数字转换器 (ADC) 断电快,在待机模式下,甚至可以被视为一种低功耗应用。
一旦加电,缺点即暴露无遗。一般来说,模拟器件在工作时需要的电流很大。例如,ADC 工作时需要的电流达数百微安。另外,模拟器件(例如内部基准时钟)会使启动时间增加几毫秒,因为稳定模拟器件需要相对较大的外部电容。另一种经常被集成的器件-集成温度传感器-通常是随温度改变的二极管电路,也需要相当大的电流。
在低功耗应用中有几个需要考虑的标准。如果 ADC 有内部振荡器,就没有必要对其它系统振荡器加电来进行转换。在这种情况下,处理器保持断电状态,只有转换完成时起,才需要开始工作。像 CPU 一样,我们可以通过缩短执行时间来降低功耗。ADC 转换的速度越快,器件进入待机模式的速度越快。对于内部基准时钟也是这样。基准时钟启动和稳定得越快,转换完成和模拟系统断电的速度也越快。如果只是偶尔使用 ADC,某些处理器允许采样时钟断电,让跟踪电路保持加电。这样 ADC 就能够进入较浅的休眠模式。这种功能的负面影响是,在进行转换前,需要花较长时间来让采样和保持电路达到稳定。
转换完成之后,有几个 µC 集成了直接内存访问 (DMA) 或先入先出 (FIFO) 缓冲存储器,能够将多个转换存储在RAM 中,而无需唤醒处理器。在一定数量的转换到达之前,处理器会保持待机状态,而不是在每个转换后唤醒处理器来将数据移入 RAM,这样就可以降低功耗。
许多低功耗 µC 内置内部模拟比较器,可以执行简单的模拟任务。有些制造商的比较器允许编程,可以通过延长响应时间降低功耗。
起始点
总之,µC 外围设备的选择是由终端应用最终决定的,因此我们应从全面评估系统功能及其功率要求着手。许多处理器制造商宣称其器件具备低功耗工作能力,但是不同的应用对“低功耗”一词有不同的定义。是需要大量集成的速度更高的处理器,还是需要具有极深度睡眠模式的速度更低的处理器,更多地取决于内嵌系统的要求,而不是内嵌处理器所谓的“低功耗”工作能力。






评论