
TMS320F2812的三相整流器设计研究
O 引言
PWM整流器与传统的不控整流或相控整流相比,具有功率因数高,输入电流正弦波形好,可实现能量的双向传输等优点,是一种真正的“绿色电源”,一直成为研究的重点。在对PWM整流器的研究过程中,学者先后提出了多种控制方案,其中SVPWM(空间矢量调制)以其具有直流电压利用率高、可以快速动态响应等优点而备受研究者们的关注。
本文在分析了电压空间矢量控制原理的基础上,提出了一种便于数字实现的控制算法。该算法采用输入电压空间矢量定向,直接计算空间电压矢量的位置和作用时间,同时利用数字信号处理器(DSP)来实现三相PWM整流器空间矢量的全数字控制。本文介绍了其系统组成及控制原理,最后给出了实验波形。
1 空间矢量脉宽调制原理
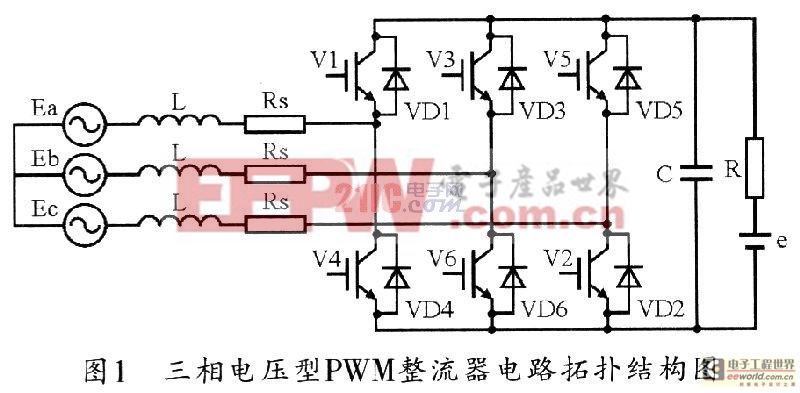
图l是三相电压型整流器(VSR)的主电路拓扑结构,该结构与三相逆变器拓扑结构非常相似,因而可以把3个电感L和电网输入整体看作是一个交流电机模型,并把类似于三相交流电机的空间矢量控制方法用到三相VSR的控制中来。
设电网的三相电压分别为:

那么,根据定义的开关函数,其空间矢量共有8种工作状态:(000)、(001)、(010)、(011)、(100)、 (101)、 (110)、 (111),即V0~V7。电压空间矢量的分布位置如图2所示。事实上,空间矢量PWM控制就是通过分配电压空问矢量(尤其是零矢量)的作用时间,以最终形成等幅不等宽的PWM脉冲波,从而实现追踪磁通的圆形轨迹。
现以图2中的V*矢量所处的位置为例,产生PWM输出的一个简便方式就是利用扇区I的相邻矢量V4和V6,使其各自工作部分时间,从而使平均输出满足参考矢量的要求。

2 SVPWM的实现
实现三相电压型整流器的SVPWM调制时,一般应先计算电压空间矢量V*:再判断V所在的扇区;然后根据扇区分配矢量与作用时间来生成
三相PWM信号。
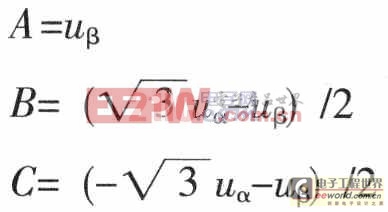
计算合成电压矢量V*可根据前面的分析来进行。而对于扇区的确定,则应计算电压合成空间矢量的区间号N,为此,可定义一种新的二相到三相的变换,其中uα、uβ为空间矢量V*在α、β轴上的坐标值。其变换如下:
若:A>0,则X=l,否则X=O;
B>0,则Y=1,否则Y=0:
C>0,则Z=1,否则Z=0;
设N=X+2Y+4Z,那么:
若N=3,则V*位于图2中的I扇区:
N=1,则V*位于图2中的II扇区:
N=5,则V*位于图2中的III扇区:
N=4,则V*位于图2中的IV扇区:
N=6,则V*位于图2中的V扇区:
N=2,则V*位于图2中的VI扇区。
3 各矢量作用时间的计算
根据参考电压,可直接计算空间矢量在各扇区的工作时间。若以图2所示的位置为例,则参考电压V*可由其所在扇区的两个相邻矢量V4和V6合成。即:

式中,t4、t6分别为矢量V4、V6的作用时间;T0为采样周期的一半,即Ts/2;V*cosθ为参考电压在α轴的分量;V*sinθ为参考电压在β轴的分量。
化简上式得:

根据等式两端虚部与虚部相等,实部与实部相等的原则,可以得出t4与t6的值:
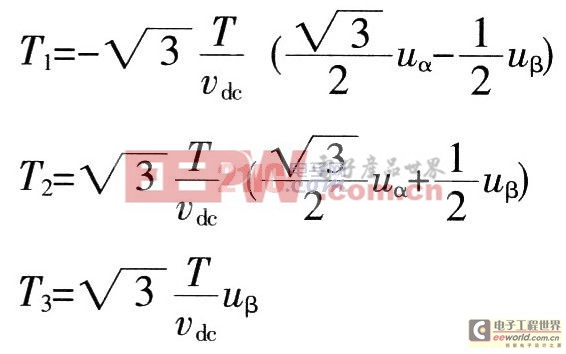
依据同样的方法,便可以求得其他扇区内的矢量安排时间,为便于观察运用,在此定义三个量T1、T2、T3:

对于不同的扇区,Tx、Ty可按表l所列来进行取值。Tx、Ty赋值后,还要对其进行饱和判断。若Tx+Ty>T,则取:
Tx=TxT/(Tx+Ty)
Ty=T2T/(Tx+Ty)
4 控制系统的设计
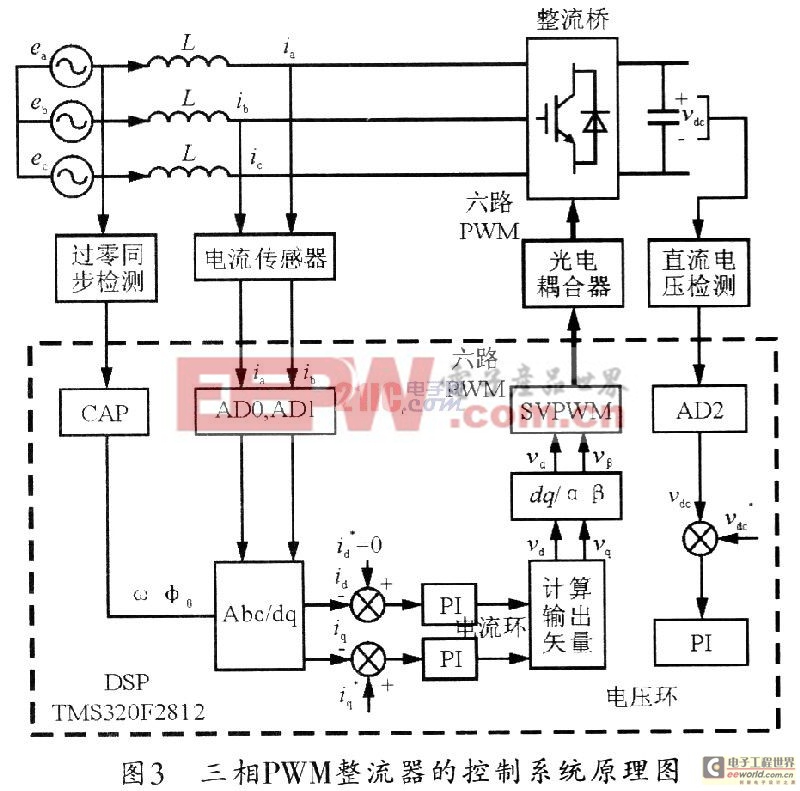
控制电路是该整流电路的重要部分,控制电路品质的优劣直接影响本整流电路的性能。三相电压型整流器控制系统通常采用双闭环控制结构。它在电压外环控制直流侧电压,并给电流内环提供指令电流;而电流内环则根据指令电流进行电流快速跟踪控制。电流参与控制提高了整个系统的动态响应能力,同时具有电流控制精度高、限流容易等优点。图3所示为三相PWM整流器的双闭环控制原理。

笔者在基于理论分析的基础上,设计了一个功率为1 kW的三相可逆整流装置。该装置的交流侧采用三相电压输入,每相50 V/50 Hz,电感为12 mH。直流侧参数为:负载50 Ω、输出直流电压150 V,电容2200μF。图4给出了阻性满载、半载、轻载情况下的三相输入电流及输入电压的波形图。
5 结束语
根据本文的分析和实验波形,可以得出以下结论:
(1)随着负载变轻,系统的功率因数相应的降低了。
(2)在负载变轻的同时,输入电流的THD也随之增加了,说明系统的电流跟踪效果变差了。
(3)从实验数据看出,系统在重载工作时效率较高。而随着负载的减轻,系统的效率也下降。这是因为电路存在固有损耗,轻载时固有损
耗所占的比重较大,所以效率较低。而加载后,其所占比重逐渐减小,所以效率也相应的增加。










评论