
步进电机原理及术语
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化设备中。步进
电机和普通电动机不同之处在于它是一种将电脉冲信号转化为角位移的执行机构,它同时完成两个
工作:一是传递转矩,二是控制转角位置或速度。
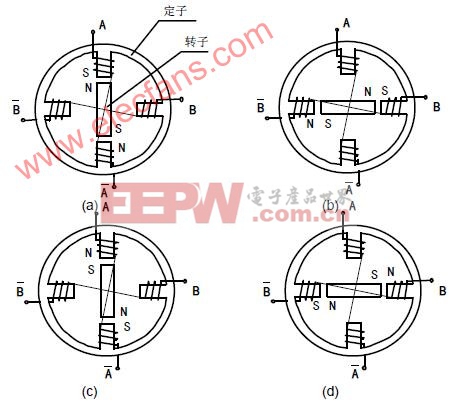
电机工作原理:图 2.1 为两相步进电机的工作原理示意图,它有2 个绕组。当一个绕组通电后,其定子磁极产生磁场, 将转子吸合到此磁极处。若绕组在控制脉冲的作用下, 通电方向顺序按照
 四个状态周而复始进行变化,电机可顺时针转动;通电时序为
四个状态周而复始进行变化,电机可顺时针转动;通电时序为
 时,电机就逆时针转动。控制脉冲每作用一次,通电方向就变化
时,电机就逆时针转动。控制脉冲每作用一次,通电方向就变化
一次,使电机转动一步,即90 度。4 个脉冲,电机转动一圈。脉冲频率越高,电机转动越快,实
际电机的节构要比模型复杂,并且每转一步,一般为1-8°。
步进电机的输出力矩与电机的有效体积、线圈匝数、磁通量、电流成正比,因此,电机有效体
积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之越小。
步进电机术语:
相数:
是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
步距角:
对应一个脉冲信号,电机转子转过的角位移。一般二相电机的步距角为 1.8 度,即电机运动
200 步为一周。
静力矩(HOLDING TORQUE):
是指步进电机通以额定电流但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数
之一,通常步进电机在低速时的转矩接近静力矩。
定位力矩(DETENT TORQUE):
是指步进电机没有通电的情况下,定子锁住转子的力矩。
步距角精度:
步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:(误差/步距角)´ 100%。
步进角的误差不累积。
最大空载起动频率:
电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
最大空载的运行频率:
电机在某种驱动形式、电压及额定电流下,电机不带负载的最高运行频率。
相电流:
电机绕组所通过的电流。
电机矩频特性:
电机在某种测试条件下测得运行中输出力矩与脉冲频率关系的曲线称为电机矩频特性,这是电
机诸多动态曲线中最重要的,也是电机选择的根本依据。如图2.2 所示,在低速时的电机力矩接近
静力矩,随着电机速度的增加,电机输出力矩不断衰减。
电机的动态力矩取决于电机运行时的相电流在额定电流和电压下,相电流越大,电机输出力矩
在低速时越大,电压越高,高速运转时力矩越大。
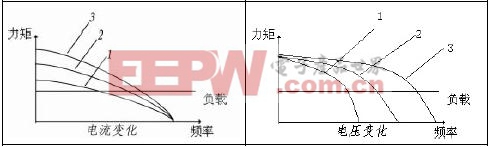
图2.2 电机矩频特性曲线
图2.2 中,1-3 表示电压或电流的值变大时,力矩的变化趋势。另外,请注意,同一电机
的矩频特性曲线在不同驱动器下的表示是会有差异的,所以选型时要留有余量。
电机的共振点:
步进电机均有相对固定的共振区域,2、4 相混合式步进电机的共振区一般在180~250pps 之
间(步距角1.8 度)。电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向
上偏移。为使电机输出力矩大,不失步及使系统的噪音降低,一般工作点均应偏移共振区较多。注
意:细分会改变共振区的位置。
丢步(失步):
控制器给电机发了 n 个脉冲,步进电机并没有转动n 个步距角。一般当电机力矩偏小、加速度
偏大、速度偏高、摩擦力不均匀等都会使丢步现象发生。
步进电机的类型:
步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为 7.5 度或15 度;
反应式步进电机一般为三相,可实现大转矩输出,步进角一般为 1.5 度,但噪声和振动都很大。
反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩;
混合式步进电机是指综合了永磁式和反应式的优点而设计的步进电机。它又分为两相和五相:
两相步进角一般为1.8 度,而五相步进角一般为0.72 度。目前,两相混合式步进电机最常用。
步进电机的极性:
步进电机分双极性电机和单极性电机。如图 2.3(a)所示双极性电机,电流在2 个线圈流动
时序为AA ® BB ® AA ® B B ;而单极性电机线圈中电流的流动方向是固定的,如图2.3
(b)所示,其通电时序为VA ® VC ® VB ® VD 。
单极性电机的驱动器较双极性电机驱动器简单,但单极性电机的输出力矩较小。
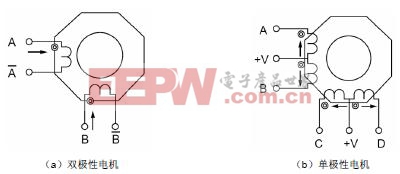
(a)双极性电机(b)单极性电机
图2.3 步进电机线圈的极性
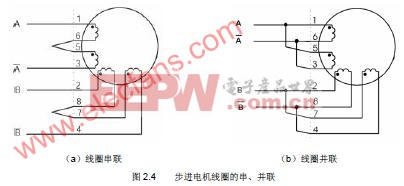
步进电机线圈的串、并联:
许多 2 相步进电机有8 根引线,这种电机既可以串联连接又可以并联连接。
串联连接的电机,电流较小,低频力矩较大;并联连接的电机,电感较小,所以启动、停止速
度较快,高频力矩有所增大
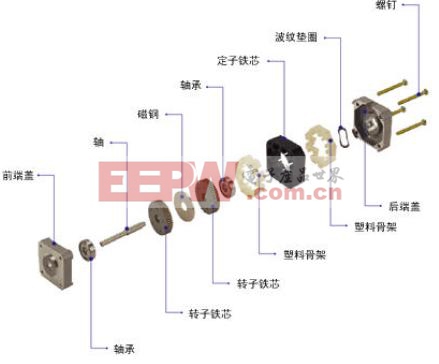
步进电机结构:












评论