
基于LPC2148的电机测速系统
1 系统的工作原理
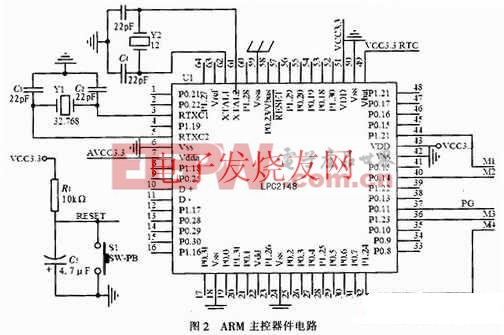
该系统主要由基于LPC2148为核心的主控电路连接电机驱动电路、通信模块电路(RS232)、测速电路(霍尔传感器)、A/D转换电路等其他电路组成,如图l所示。图2为ARM主控芯片。LPC2148为核心的主控电路负责频率输出,通过改变频率的大小来控制电机的转速,采集电路采集的数据可以通过RS-232接口电路与PC机实现通信。同时LPC2148模块将采集到的数据进行处理,根据偏差值进一步修正频率控制信号的输出。

2 硬件设计
2.1 调速模块设计
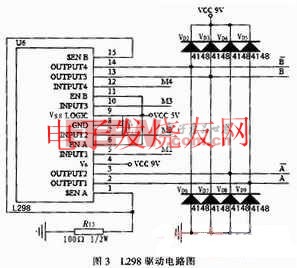
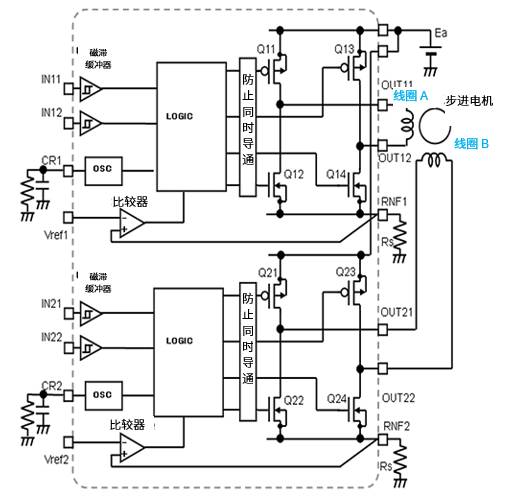
该系统对步进电机进行调速通过调整频率的方法。步进电机转速=f×60/200x,其中x是细分倍数,细分驱动方式下,由于步距角小,步进电机的控制精度明显提高,同时这种驱动方式又可有效抑制低速运行中产生的噪声和振荡现象。步进电机采用1.8°的二相四拍式,200个步进脉冲可以转一圈。其步进动作时受ARM控制,电机专用驱动器L298对步进电机进行驱动,驱动电路如图3所示。L298内部包含4通道逻辑驱动电路,是一种二相和四相电机的专用驱动器。即内含2个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46 V、2 A以下的电机。ARM主控制器是通过右端的控制口
2.2 霍尔传感器的测速模块
2.2.1 霍尔效应
一块长度为l,宽度为b,厚度为d的半导体薄片,当它被置于磁感应强度为B的磁场中,如果在其相对两边流通控制电流I,且磁场方向与电流方向正交,则在该半导体另外两边将产生一个与控制电流I和磁感应强度B乘积成正比的电势UH,即UH=KHIB,其中KH为霍尔元件的灵敏度,该电势称为霍尔电势,该半导体薄片就是霍尔元件,其大小和外磁场及电流成比例。霍尔开关传感器由于其体积小,无触点,动态特性好,使用寿命长等特点,广泛应用于测量转动物体旋转速度领域。这里选用SPRAGUE公司生产的霍尔转速传感器,它是一种硅单片集成电路,其内部含有稳压电路、霍尔电势发生器、放大器、史密特触发器和集电极开路输出电路,具有工作电压范围宽、可靠性高、外电路简单、输出电平可与各种数字电路兼容等特点。
2.2.2 工作原理
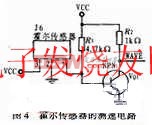
霍尔传感器信号放大器将霍尔电势UH放大后再经整形、放大,输出幅值相等、频率变化的方波信号,该霍尔电势的幅值随磁场强度变化而变化。
转速的测量方法有很多种,根据脉冲计数实现转速测量的方法主要有M法(测频法)、T法(测周期法)和MPT法(频率周期法)。该系统采用M法(测频法),霍尔传感器的测速电路,如图4所示。
2.3 其他电路模块
2.3.1 电源模块
电源模块供电时先经过二极管VD1,可防止提供极性相反的电源烧坏硬件,并采用SPXlll7M3-3.3型三端稳压器为微控制器、RS232、霍尔传感器提供电源,同时也为CAT8llR供电。CAT811R微控制器监控电路(3.3 V电压时,误差±5%)用来监控数字系统的电源,它可以产生一个复位信号,该信号在电源电压低干预置的阈值时和电源电压上升到该阈值后的140 ms内有效,K1为手动复位按键。
2.3.2 RS232接电电路
RS232接口实现与上位机通信,如:向上位机(主机)发送测量到的数据,接收上位机发来的控制指令,进行参数设置及校准操作。与上位机的通信指令采用不定长的ASC代码指令,用不同的信令头(SOT)代表不同的控制,并有CRC纠错以保证数据正确传输,信令有统一的结束码(EOT)。
2.3.3 LCD显示电路
采用TCM24064B完成图形显示、文本显示以及图形与文本混合显示,内置128种5×8点阵的ASCI字符字模库CGROM,字符代码为00H~07 H。对液晶显示器的软件设计实际是对控制器T6963C的指令操作,T6963C最大的特点是具有独特的硬件初始值设置功能,显示驱动所需的参数如占空比、驱动传输的字节数/行及字符的字体都有引脚电平设置数,初始化在上电时已基本完成。
3 系统软件设计
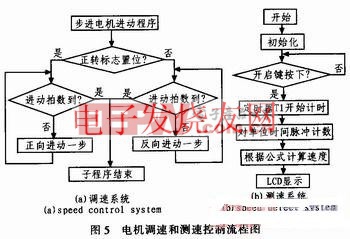
图5(a)为步进电机的调速系统软件设计流程图,主要实现接收主控制器的频率,图5(a)为测速系统软件设计流程图,用于实现采集实际速度m,并对比输人速度n,得到是否有偏差(m-n),把偏差值通过A/D转换电路反馈给主控制器,最后通过PC机调整输出频率,从而实现对转速的调整。
4 结束语
该系统设计采用LPC2148为核心控制器,利用步进电机调速电路和基于霍尔传感器的测速电路,大大提高了转速的稳定性和精确性,而实验结果也验证了转速误差可控制在±0.2 m/s之内。在调试过程中需要注意的问题是,如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度上升到所希望的高频;以及解决驱动器通电以后电机抖动不能转动的问题,遇到这种情况时,首先检查电机与驱动器L298的连接是否正确;如果没有接错,再检查输入频率是否太高;是否升降频设计不合理;如果以上原因都不是,可能是驱动器被烧毁。基于LPC2148的整个系统有电压利用率高,功耗低的特点,并且简化了外围接口电路的设计。将采集到的信号进行处理,通过反馈电路把误差值传回主控芯片,进一步修正输出频率,从而提高了转速精度。

霍尔传感器相关文章:霍尔传感器工作原理
半导体制冷相关文章:半导体制冷原理
霍尔传感器相关文章:霍尔传感器原理 激光器相关文章:激光器原理 激光二极管相关文章:激光二极管原理











评论