
超声波传感器的原理及应用
超声波传感器的检测范围取决于其使用的波长和频率。波长越长,频率越小,检测距离越大,如具有毫米级波长的紧凑型传感器的检测范围为300~500mm波长大于5mm的传感器检测范围可达8m。一些传感器具有较窄的6ordm;声波发射角,因而更适合精确检测相对较小的物体。另一些声波发射角在12ordm;至15ordm;的传感器能够检测具有较大倾角的物体。此外,我们还有外置探头型的超声波传感器,相应的电子线路位于常规传感器外壳内。这种结构更适合检测安装空间有限的场合。
8、传感器调节

几乎所有的超声波传感器都能对开关输出的近点和远点或是测量范围进行调节。在设定范围外的物体可以被检测到,但是不会触发输出状态的改变。一些传感器具有不同的调节参数,如传感器的响应时间、回波损失性能,以及传感器与泵设备连接使用时对工作方向的设定调节等。
9、重复精度

波长等因素会影响超声波传感器的精度,其中最主要的影响因素是随温度变化的声波速度,因而许多超声波传感器具有温度补偿的特性。该特性能使模拟量输出型的超声波传感器在一个宽温度范围内获得高达0.6mm的重复精度。
10、输出功能

所有系列的超声波传感器都有开关量输出型产品。一些产品还有2路开关量输出(如最小和最大液位控制)。大多数产品系列都能提供具有模拟量电流或是模拟电压输出的产品。
11、噪声抑制

金属敲击声、轰鸣声等噪声不会影响超声波传感器的参数赋值,这主要是由于频率范围的优选和已获专利的噪声抑制电路。
12、同步功能
超声波传感器的同步功能可防干扰。他们通过将各自的同步线进行简单的连接来实现同步功能。它们同时发射声波脉冲,象单个传感器一样工作,同时具有扩展的检测角度。
13、传感器交替性工作
超声波传感器 超长扫描型
以交替方式工作的超声波传感器彼此间是相互独立的,不会相互影响。以交替方式工作的传感器越多,响应的开关频率越低。
14、检测条件
超声波传感器特别适合在“空气”这种介质中工作。这种传感器也能在其它气体介质中工作,但需要进行灵敏度的调节。
15、盲区
直接反射式超声波传感器不能可靠检测位于超声波换能器前段的部分物体。由此,超声波换能器与检测范围起点之间的区域被称为盲区。传感器在这个区域内必须保持不被阻挡。
16、空气温度与湿度
空气温度与湿度会影响声波的行程时间。空气温度每上升20ordm;C,检测距离至多增加3.5%。在相对干燥的空气条件下,湿度的增加将导致声速最多增加2%。
17、空气压力
常规情况下大气变化±5%(选一固定参考点)将导致检测范围变化±0.6%。大多数情况下,传感器在5Bar压力下使用没有问题。
18、气流
气流的变化将会影响声速。然而由最高至10m/s的气流速度造成的影响是微不足道的。在产生空气涡流比较普遍的条件下,例如对于灼热的金属而言,建议不要采用超声波传感器进行检测,因为对失真变形的声波的回声进行计算是非常困难的。
19、标准检测物
采用正方形声反射板用于额定开关距离sn的标定。
1mm的厚度
垂直性:与声束轴线垂直。
20、防护等级
外壳可防固体颗粒和防水。
IP65:完全防尘;防水柱的侵入。
IP67:完全防尘;在恒温下浸入水下1m深处并放置30分钟,能够有效防护。
IP69K:基于EN60529的符合DIN40050-9
21、泵功能
可施行双位置控制,例如一个液位控制系统的泵入泵出功能。当一个被测物远离传感器到达检测范围的远点时,输出动作。当被测物靠近传感器到达检测范围设定的近点时,输出相反的动作。
22、液位测试
超声波测量液位的基本原理是:由超声探头发出的超声脉冲信号,在气体中传播,遇到空气与液体的界面后被反射,接收到回波信号后计算其超声波往返的传播时间,即可换算出距离或液位高度。超声波测量方法有很多其它方法不可比拟的优点:(1)无任何机械传动部件,也不接触被测液体,属于非接触式测量,不怕电磁干扰,不怕酸碱等强腐蚀性液体等,因此性能稳定、可靠性高、寿命长;(2)其响应时间短可以方便的实现无滞后的实时测量。
系统采用的超声波传感器的工作频率为40kHz左右。由发射传感器发出超声波脉冲,传到液面经反射后返回接收传感器,测出超声波脉冲从发射到接收到所需的时间,根据媒质中的声速,就能得到从传感器到液面之间的距离,从而确定液面。考虑到环境温度对超声波传播速度的影响,通过温度补偿的方法对传播速度予以校正,以提高测量精度。计算公式为:
V=331.5+0.607T (1)
式中:V为超声波在空气中传播速度;T为环境温度。
S=V ×t/2=V×(t1-t0)/2 (2)
式中:S为被测距离;t为发射超声脉冲与接收其回波的时间差;t1为超声回波接收时刻;t0为超声脉冲发射时刻。利用MCU的捕获功能可以很方便地测量t0时刻和t1时刻,根据以上公式,用软件编程即可得到被测距离S。由于本系统的MCU选用了具有SOC特点的混合信号处理器,其内部集成了温度传感器,因此可利用软件很方便的实现对传感器的温度补偿。
注意事项
1:为确保可靠性及长使用寿命,请勿在户外或高于额定温度的地方使用传感器。
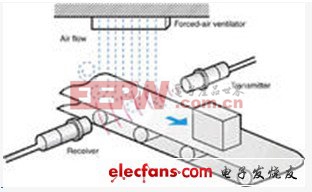
2:由于超声波传感器以空气作为传输介质,因此局部温度不同时,分界处的反射和折射可能会导致误动作,风吹时检出距离也会发生变化。因此,不应在强制通风机之类的设备旁使用传感器。
3:喷气嘴喷出的喷气有多种频率,因此会影响传感器且不应在传感器附近使用。
4:传感器表面的水滴缩短了检出距离。
5:细粉末和棉纱之类的材料在吸收声音时无法被检出(反射型传感器)。
6:不能在真空区或防爆区使用传感器。
7:请勿在有蒸汽的区域使用传感器;此区域的大气不均匀。将会产生温度梯度,从而导致测量错误。
暴露问题
超声波传感器应用起来原理简单,也很方便,成本也很低。但是目前的超声波传感器都有一些缺点,比如,反射问题,噪音,交叉问题。
反射问题
如果被探测物体始终在合适的角度,那超声波传感器将会获得正确的角度。但是不幸的是,在实际使用中,很少被探测物体是能被正确的检测的。 其中可能会出现几种误差:
1、三角误差
当被测物体与传感器成一定角度的时候,所探测的距离和实际距离有个三角误差。
2、镜面反射
这个问题和高中物理中所学的光的反射是一样的。在特定的角度下,发出的声波被光滑的物体镜面反射出去,因此无法产生回波,也就无法产生距离读数。这时超声波传感器会忽视这个物体的存在。
3、多次反射
这种现象在探测墙角或者类似结构的物体时比较常见。声波经过多次反弹才被传感器接收到,因此实际的探测值并不是真实的距离值。
这些问题可以通过使用多个按照一定角度排列的超声波圈来解决。通过探测多个超声波的返回值,用来筛选出正确的读数。
4、噪音
虽然多数超声波传感器的工作频率为40-45Khz,远远高于人类能够听到的频率。但是周围环境也会产生类似频率的噪音。比如,电机在转动过程会产生一定的高频,轮子在比较硬的地面上的摩擦所产生的高频噪音,机器人本身的抖动,甚至当有多个机器人的时候,其它机器人超声波传感器发出的声波,这些都会引起传感器接收到错误的信号。
这个问题可以通过对发射的超声波进行编码来解决,比如发射一组长短不同的音波,只有当探测头检测到相同组合的音波的时候,才进行距离计算。这样可以有效的避免由于环境噪音所引起的误读。
交叉问题
交叉问题是当多个超声波传感器按照一定角度被安装在机器人上的时候所引起的。超声波X发出的声波,经过镜面反射,被传感器Z和Y获得,这时Z和Y会根据这个信号来计算距离值,从而无法获得正确的测量。
解决

传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理 脉冲点火器相关文章:脉冲点火器原理 倾角传感器相关文章:倾角传感器原理










评论