
步进电机与8051微控制器接口
步进电机是一种无刷同步电机,它将整个旋转分成若干步。每个步进电机都有一些固定的步进角度,电机以这个角度旋转。在这篇文章中,我将向你展示如何使用两种不同的驱动器将步进电机与8051系统连接: L293D和ULN 2003。此外,这里还解释了使用8051单片机控制步进电机的方法。
本文引用地址:http://www.amcfsurvey.com/article/202304/445339.htm这些电路的主要原理是使步进电机以一个特定的步进角度逐步旋转。由于控制器不能提供电机所需的电流,所以使用ULN2003集成电路和L293D电机驱动器来驱动步进电机。
电路1:使用8051微控制器和L293D控制步进电机
本项目的第一个电路是使用L293D电机驱动器IC实现的。由于L293D电机驱动器有四个输出引脚的选项,所以只能用它来驱动一个双极步进电机。
电路图
双极步进电机与8051微控制器和L293D电机驱动器连接的电路图如下图所示。

使用8051单片机L293D控制步进电机的电路图
所需元件
AT89C51 (8051单片机)
L293D电机驱动器
5V双极步进电机
16X2的液晶显示器 Diaplay
11.0592 MHz 石英晶体
10KΩ 电阻器 X 2
10KΩ POT
8x 1KΩ 电阻器包
33pF 陶瓷电容 X 2
10μF/16V 电容
按钮 X 4
330Ω 电阻器
5V电源
电路设计
首先,LCD的数据引脚被连接到8051的PORT0引脚。由于PORT0没有任何内部的上拉,所以用一个电阻组来拉高PORT0。LCD的RS和E引脚被连接到8051的P2.0和P2.1。
RST引脚使用一个10KΩ的电阻被拉低。按钮和10μF电容的组合将被用来复位微控制器。另外,EA引脚使用一个10KΩ的电阻被拉高。
接下来是振荡器。它由两个33pF的电容和一个连接在8051的XTAL1和XTAL2引脚之间的11.0592MHz晶体组成。
来到电机驱动器,两个使能引脚和两个电源引脚被连接到+5V电源。四个输入连接到8051的PORT1引脚,即P1.0、P1.1、P1.2和P1.3。双极步进电机的四个引脚与L293D的四个输出引脚相连。
为了控制步进电机的方向,三个按钮被连接到PORT3的引脚上,即P3.0、P3.1和P3.2。
代码
工作原理
这个电路的工作非常简单。在程序中实现了一种叫做 "半步 "的方法来旋转步进电机。当按下前进按钮时,步进电机按顺时针方向旋转。


同样的,当按下向后的按钮时,它开始以逆时针方向旋转。要完全停止旋转,你可以按下停止按钮。
电路2:使用8051单片机和ULN2003控制步进电机
本项目的第二个电路是使用8051单片机和ULN2003实现步进电机控制。由于ULN2003晶体管阵列由7个输出组成,你可以控制单极和双极的步进电机。
在这个项目中,我将向你展示如何使用8051微控制器和ULN2003晶体管阵列来控制一个5线单极步进电机。
电路图
下面的图片显示了步进电机与8051微控制器和ULN2003连接的电路图。

使用8051单片机控制步进电机的电路图
电路元件
AT89C51单片机
ULN2003A
步进电机
晶体
电阻器
电容器
电路设计
该电路由AT89C51单片机、ULN2003A、电机组成。AT89c51是低功耗、高性能、CMOS 8位、8051系列微控制器。它有32条可编程的I/O线。它有4K字节的可编程和可擦除的Flash存储器。一个外部晶体振荡器被连接在微控制器的18和19引脚上。电机通过一个驱动IC连接到微控制器的端口2。
ULN2003A是一个电流驱动IC。它被用来驱动步进电机的电流,因为它需要超过60mA的电流。它是一个达林顿对阵列。它由七对具有共同发射极的达林顿阵列组成。该集成电路由16个引脚组成,其中7个是输入引脚,7个是输出引脚,其余的是VCC和地。前四个输入引脚与微控制器相连。以同样的方式,四个输出引脚连接到步进电机。
步进电机有6个引脚。在这6个引脚中,2个引脚连接到12V电源,其余的连接到步进电机的输出。步进电机以一个给定的步进角度旋转。旋转的每一步都是整个周期的一小部分。这取决于机械部件和驱动方法。
与所有的电机类似,步进电机将有定子和转子。转子有永久磁铁,定子有线圈。基本的步进电机有4个线圈,旋转角度为90度。这四个线圈是按循环顺序激活的。下图显示了轴的旋转方向。有不同的方法来驱动步进电机。下面将对其中的一些进行解释。
全步驱动: 在这种方法中,一次给两个线圈通电。因此,这里一次有两个相反的线圈被激发。
半步驱动: 在这种方法中,线圈是交替通电的。因此,它以半步角旋转。在这种方法中,可以一次给两个线圈通电,也可以给单个线圈通电。因此,它增加了每个周期的旋转次数。它显示在下图中。
如何操作这个步进电机驱动电路?
首先,打开电路。
微控制器开始驱动步进电机。
人们可以观察到步进电机的旋转。
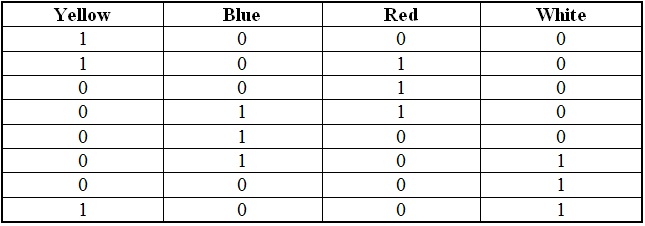
步进电机有四根线。它们是黄色、蓝色、红色和白色。这些电线交替通电,如下图所示。
在全步驱动中,使用以下顺序
全步驱动

要以半步角驱动电机,请使用以下顺序
半步角
步进电机控制器电路的优点
消耗的功率较小。
它需要较低的工作电压。
步进电机控制应用
该电路可用于机器人应用。
它也可用于机械电子学应用。
步进电机可用于磁盘驱动器、矩阵打印机等。












评论