
汽车雷达传感器和拥挤的无线电频谱
随着汽车雷达的普及,大量占用的射频频谱将类似于城市环境中的电子战场。雷达将面临无意或故意干扰攻击的组合,设计人员必须实施反干扰技术,如电子战(EW)中使用的技术。
本文引用地址:http://www.amcfsurvey.com/article/202212/442130.htm随着汽车雷达的普及,大量占用的射频频谱将类似于城市环境中的电子战场。雷达将面临无意或故意干扰攻击的组合,设计人员必须实施反干扰技术,如电子战(EW)中使用的技术。
汽车雷达通常可能会遇到拒绝或欺骗性干扰攻击。否认干扰使受害者雷达失明。这种技术降低了信噪比,因此降低了目标检测的概率。另一方面,欺骗性干扰使受害者雷达“认为”存在虚假目标。受害者雷达失去了跟踪真实目标的能力,因此,受害者的车辆行为受到严重影响。
这些干扰攻击可能源于汽车雷达之间的相互干扰,也可能是通过使用廉价的硬件将强连续波(CW)信号指向受害者雷达而故意发生的。
虽然目前的干扰避免技术对于今天来说可能已经足够了,但随着雷达传感器的普及,需要单独使用一种弹性的缓解技术或与避免方法结合使用。弹性技术包括时频域信号处理或复杂的雷达波形。
雷达波形
雷达波形是决定干扰器存在时传感器性能的关键系统参数之一。当今77 GHz频段的汽车雷达主要使用FMCW型波形。在FMCW雷达中,CW信号在RF频段上线性扫描或啁啾频率。图1显示了一个FMCW线性调频序列(CS)波形示例。

图1.FMCW CS示例。
频率差(fb,拍频)与到目标的距离 R 成正比,可通过以下关系确定:
![]()
干扰的影响
当FMCW雷达传感器在频段的同一部分工作时,干扰发生在密集的RF环境中。参见图2中一个典型的迎面而来的汽车干扰示例。

图2.a) FMCW 拒绝干扰和 b) FMCW 欺骗性干扰的示例。
拒绝干扰
落入接收器带宽的任意FMCW型强干扰信号会提高受害雷达的本底噪声。这种拒绝干扰可能会导致小目标(即小雷达横截面(RCS))由于信噪比差而消失。
拒绝攻击也可以通过简单地向受害者FMCW雷达发射强CW信号来有目的地进行。受害者雷达的影响类似于FMCW干扰情况(见图4)。
欺骗性干扰
如果干扰信号扫描与受害雷达同步但延迟,那么影响将是固定范围内的欺骗性错误目标生成。这种技术在电子战干扰器中很常见。迎面而来的类似类型的汽车雷达将充当无意的干扰器。然而,受害者和干扰雷达之间时间对齐的可能性将非常小。小于受害雷达最大距离延迟的干扰器延迟偏移可能看起来像一个真正的目标。例如,200 m 的最大范围需要小于 1.3 μs 的扫描对齐。然而,这种欺骗性攻击可能是故意使用安装在迎面而来的汽车平台上的复杂电子战式设备进行的。
更一般地说,欺骗性干扰是基于通过延迟和频率的系统性变化重新传输受害者雷达的信号。这可以是非相干的,在这种情况下,干扰器被称为转发器,也可以是相干的,当它是中继器时。中继器接收、更改和重新传输一个或多个干扰信号,而应答器在干扰器检测到所需的受害信号时传输预定信号。
复杂的基于中继器的攻击通常需要数字RF存储器(DRFM)。DRFM能够执行协调的距离延迟和多普勒门拉开攻击。因此,保持虚假目标范围和多普勒属性以欺骗受害者雷达。
干扰缓解技术
基本方法:回避
基本的雷达干扰缓解技术主要依赖于回避方法。目标是减少空间、时间和频率重叠的可能性,例如:
空间:使用窄的电子扫描光束可以降低干扰风险。远程汽车巡航控制(ACC)雷达的典型视场为±8°。尽管如此,强大的干扰器仍然可以通过天线旁瓣有效。
时间:随机化 FMCW 线性调频斜率参数以避免周期性干扰。
频谱:随机化 FMCW 线性调频开始和停止频率,以减少重叠和干扰的可能性。
随机化的基本方法可以避免与其他雷达的意外同步,但在密集的RF环境中可能没有那么有用。越来越多的雷达传感器将需要更复杂的弹性技术来减轻干扰。
战略方法:检测和修复
另一种避免方法可用于使用信号处理算法修复接收波形。时域技术可以有效对抗拒绝类型的干扰攻击。在迎面而来的汽车FMCW干扰场景中,干扰器会在很短的时间内扫描所有频率箱。这种快速时变信号表现为常规FFT域中本底噪声升高。时频域信号处理技术将信号传输到另一个域,与FFT域相比,该域更容易滤除干扰(见图3)。

图3.雷达回波中频波形的FFT和STFT域表示。
对于时变信号,短时傅里叶变换(STFT)比常规FFT提供更多的信息。基于STFT的技术可用于窄带干扰切除。STFT实质上是通过信号移动一个窗口,并获取窗口区域的FFT。信号在频域中滤波,以去除干扰器分量,然后再转换回时域。
图4显示了典型的FMCW干扰场景,其中RF线性调频序列重叠,以及STFT域中产生的IF拍频信号。

图4.STFT域,左:FMCW雷达和干扰器,右:IF域。
图4右侧的曲线显示了IF域,这是雷达(蓝色)和干扰(橙色)信号混合的最终结果。水平线表示目标,而V形垂直线表示存在干扰信号。
类似或相反方向的干扰FMCW,甚至是类似CW的慢啁啾,都会对IF信号产生类似的影响。在所有这些干扰场景中,快速移动的V形IF信号会提高常规FFT域中的本底噪声,如图3所示。
基于幅度的掩码可用于滤除STFT域中的干扰信号。当然,这假设受害者雷达前端和量化具有足够的动态范围,可以同时线性处理更强的干扰器信号和小的预期目标。参见图 5。

图5.STFT域中基于幅度的掩码。
图5的顶部图像描绘了一个强干扰器,而底部显示了处理后的STFT。在强干扰器存在的情况下,多个真实目标是不可见的,如顶部所示。下图中的V形干扰器被切除,低SNR目标在转移回时域时现在可以识别。
基于STFT的干扰缓解技术可用于针对强干扰器的拒绝干扰场景。对于欺骗性干扰攻击,仅靠STFT无法验证返回信号是真还是假。
加密射频
减少中继器攻击欺骗性干扰影响的基本对策是使用低拦截概率(LPI)雷达波形。LPI雷达的目标是通过将辐射能量分散到宽频谱上来逃避检测,通常通过准随机扫描,调制或跳频序列。FMCW是一种LPI波形。如果在线性调频中引入相位编码或加密,则可以进一步降低DRFM拦截汽车雷达信号的机会。
每个雷达传感器独有的加密射频特征可以验证返回信号。图6显示了一个用例,其中两个相同的雷达(其中一个安装在不同的汽车上)在它们之间具有频率偏移和延迟,在受害者雷达中产生一个虚假目标。干扰雷达与受害雷达进行时间对齐(相同的啁啾斜率和短偏移)。

图6.由于具有频率偏移和延迟的相同雷达而导致的干扰。
相位编码FMCW雷达可以在这种用例中提供高干扰鲁棒性。使用正交码还可以通过启用多个同步发射波形使MIMO雷达操作成为可能。
编码要求:
代码长度:目标是通过短序列实现最小范围的旁瓣电平。PRN 序列长度为 1024 导致峰值旁瓣电平 (PSLL) 约为 30 dB (10log1024)。可以优化发送代码和接收滤波器权重,以牺牲SNR为代价来改善PSLL。
良好的互相关特性:集合成员的互相关系数应为零,以实现传感器之间的良好分离
多普勒电阻:相位编码雷达性能可能会受到多普勒频移的影响。二进制代码是多普勒不容忍的。多相代码的退化速度低于二进制代码。
可用数量的不同代码:大家庭规模最好为每个雷达传感器分配一个唯一的代码。
图7显示了没有相位编码的雷达回波。干扰信号将自己显示为错误目标。当发射机FMCW波形用PRN序列进行相位编码时,干扰信号可能会被抑制,如图8所示。

图7.雷达返回,无需相位编码虚假和真实目标。

图8.带和不带相位编码的雷达返回。
这种方法会影响动态范围。但是,雷达信号处理器可以使用相位编码的FMCW进行几次线性调频来标记错误目标,然后切换回正常工作状态。
结论和未来趋势
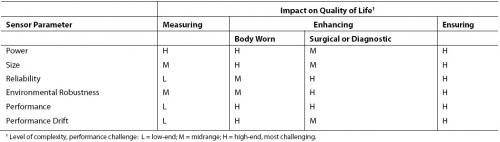
拥挤的汽车雷达传感器环境中的干扰可以通过先进的信号处理算法和复杂的波形生成技术来缓解。基于STFT的信号处理技术可用于抵御拒绝类型的攻击。相位编码FMCW通过处理增益和拦截避免,为非相干和相干欺骗性攻击提供了额外的抵抗层。有关缓解技术的摘要,请参阅表 1。

之前详细的汽车雷达干扰缓解原则也适用于其他雷达传感器环境,例如机器人、道路收费、GPS 和无人机着陆或防撞系统。
目前,汽车雷达传感器以非协作模式运行,彼此之间没有通信。虽然合作操作模式需要全行业的协调,但雷达传感器之间的仲裁可以帮助解决干扰问题。
包括传感器合作在内的未来雷达概念将是通信节点和雷达传感器的融合。具有复杂波形的未来雷达也提供了在雷达信号中包含信息的可能性。相同的硬件可以同时用于雷达和通信(RadCom)。
RadCom:一个用于同时进行雷达和通信的单一系统:
无干扰的多用户功能
使用 OFDM 或类似通信代码对雷达信号进行编码提供了在雷达信号中包含信息的可能性
由于基于OFDM的雷达发射信号而同时
ADI公司的5G毫米波收发器信号解决方案具有大于GHz的带宽和波束控制能力,可能是RadCom系统概念的潜在候选者。
ADI在开发最先进的雷达传感器和5G毫米波解决方案方面处于独特的地位,为未来的RadCom系统铺平道路。
ADI公司的Drive360 28 nm CMOS雷达技术:
ADI公司的Drive360™ 28 nm CMOS雷达平台支持许多高级信号处理集成选项,甚至允许定制IP集成,使设计人员能够区分其系统。该平台随附高度集成的电源管理配套芯片。该系统为一级供应商和原始设备制造商提供了为新兴自动驾驶应用构建强大解决方案所需的高性能。
5G 毫米波
ADI公司凭借我们独特的微波比特能力为5G微波工作做出了巨大贡献。我们广泛的技术组合和持续的RF技术进步,加上我们在无线电系统工程方面的悠久历史,使ADI在为新兴的5G系统开拓微波和毫米波频率的新解决方案方面处于领先地位。








评论