
皮带机渣土流量控制系统
摘 要:随着隧道的开挖技术日益成熟,盾构法隧道施工带来的技术革新和技术效益正在凸显。在各种盾构机中,土压平衡盾构机是盾构掘进机的一种,在其工作过程中会引起土体扰动,严重时会造成地表开裂和建筑物倾斜等事故。本文主要为避免土压平衡式盾构机在推进过程中因出土量的过多或者过少引起的超挖或欠挖导致地面隆起或塌陷等情况,设计了土压平衡式盾构机土传送带控制系统,通过STM32F103RCT6单片机进行传送带控制,能够实现传送带单闭环PID(比例、积分、微分)控制电机转速,通过Modbus485串口进行发送和读取数据进行传送带的速度,最终实现传送带转速闭环控制。
本文引用地址:http://www.amcfsurvey.com/article/202209/438529.htm关键词:土压平衡式盾构机;STM32单片机;PID闭环控制;Modbus485串口
1 背景
为了缓解人口增加所造成的交通拥堵问题,城市的轻轨和地铁建设加快了进程。其中,地下空间开发尤为重要。地下轨道交通不仅可以均衡人口矛盾,减少污染,同时对实现社会可持续发展有着重要意义。
土压平衡式盾构机作为地铁隧道施工的主要设备,在施工过程中,可能会出现超挖和欠挖等状况。例如城市道路中突然出现地面空洞,对城市安全生活产生了很大影响,渣土流量监测能够预防超挖和欠挖,所以对渣土流量的检测便成为了重中之重。在各种盾构机中,土压平衡盾构是盾构掘进机的一种,在其工作过程中会引起土体扰动,从而改变地层的应力状态,进而造成地表变形,当变形过大时会引发地表开裂、地面建筑物倾斜等施工事故。由于土压平衡式盾构机在推进过程中因出土量的过多会这过少引起的超挖或欠挖导致地面隆起或塌陷等情况,因此得到精确的渣土的流量迫在眉睫。在以往的渣土流量检测中,普遍采用测量重量的方法,但由于渣土密度多变,致使测量流量得到的测量值与真实值比较具有较大误差,故引入激光三维检测技术。本文采用了对电机速度进行控制,使其以一个恒定速度转动,从而对渣土流量进行测量,该方法具有高效率, 高精度且可实时监测的优点,对土压平衡式盾构机的渣土流量测量系统具有重要的意义。
2 系统总体方案
本文首先将带有编码器的电机中,编码器 A 相引脚与单片机 PA0 相连,将 PWM(脉冲宽度调制)输出引脚与单片机PB5相连,从而使单片机正常控制电机旋转,将单片机串口通过 Modbus485 串口进行通信,能够通过上位机对电机进行数据发送与输入,对电机进行进一步控制。
2.1 硬件总体方案
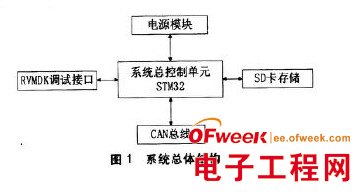
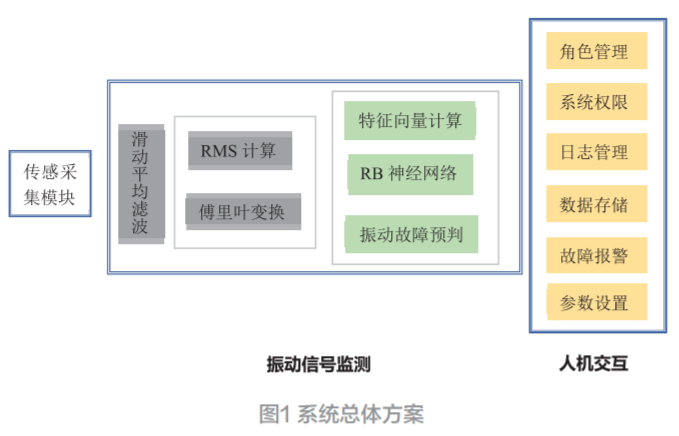
根据设计需要,需构建如图 1 所示调速系统。系统的主电路主要由电源模块、控制器、驱动放大模块、测量反馈、激光雷达、威纶通构成。其中电源模块一方面实现对控制器单片机系统提供直流电源,同时为驱动模块提供电源;测量反馈电路不仅可以对直流电机进行测速,而且可以作为输入信号反馈给控制器;显示模块实现人机交互,更好地反映了直流电机的速度变 化过程。系统原理图如图 2 所示。


根据设计要求,系统硬件采用的方案如下。硬件部分实现控制电机转速功能,包括:STM32F103RCT6 控制器、直流电机模块、供电模块、驱动模块、编码器、激光雷达、威纶通。
2.2 软件总体方案
系统的软件主程序流程图如图 3 所示。软件部分实现功串口通信功能,主要设计思想是能够通过 32 单片机串口进行输出电机转速调节情况,其次能够通过串口助手向单片机发送转速指令,使电机转速能够调节至设定的目标值。首先启动电源,通过 Modbus485 串口发送目标转速,则 PID 控制器发出 PWM 信号,若此时电机转速与目标转速有偏差,则 PID 控制器会根据偏差重新发送 PWM 信号,进行电机控制,直至电机转速等于目标转速。

3 电机控制系统硬件电路
根据设计要求和硬件总体结构可知,系统硬件选型主要包含以下部分:直流电机,作为调速系统的被控对象,选用带编码器的 GA12-N20 电机;选用 L7809 稳压模块给直流电机供电;选用 STM32F103RCT6 作为核心控制器;选用 L298N 作为驱动模块。上位机选用威纶通,激光雷达。
3.1 USB模拟串口电路设计
使用 USB-TTL 串口,通过串口助手,实现单片机数据的发送与接收,串口电路设计如图 4 所示。

3.2 驱动模块电路设计
B6612FNG 每通道输出最高连续驱动电流为 1 A,启动峰值连续脉冲电流可以达到 2 A,启动峰值单脉冲电流可以达到 3 A。电机控制模式有 4 种分别是:正转模式、反转模式、制动模式、停止模式。TB6612FNG 驱动模块结构示意图如图 5 所示。

3.3 控制器的选型
控制器可选用 STM32F103RCT6 单片机作为主控制器,较好的完成了目标要求。系统原理图如图 6 所示。

3.4 激光雷达模块设计
激光雷达模组用于将十个传感器进行固定,本文制作了一块固定传感器的电木板,这块电木板的制作流程则是先查阅传感器上面各个位置的尺寸,从而进行绘图,并定好每个传感器之间的间距、边框的大小以及板子的材质和厚度等。再通过螺丝使传感器固定在上面,从而可以实现传感器之间距离相等,高度一致,使渣土流量的测量更加精确。
最终需要固定一个框架,长宽高分别为 46 cm, 44 cm,23 cm,该框架实物如图 7 所示,将传感器以及各种装置固定在这个框架中,完成整个装置,从而实现渣土流量的测量,最后,通过 Type-c 接口的 USB 视频采集卡连接威纶通 HMI 的 HDMI 接口,通过手机的显示屏进行数据显示,其中数据就包括渣土的流量以及各种传感器参数。

3.5 PCB版模块
由于皮带机通常在恶劣的环境下进行工作,需要将传感器稳定连接,因此需要制作 TF-mini-i 传感器专用 Modbus 总线集线器。本文设计了集线器 PCB 板,这块 PCB 板需要通过软件画出,然后进行制作,其中这块 PCB 板上面有 10 个插件,这种插件为直脚插座连接器接插件,间隙为 1.25 mm,一个小的插件上有六个直针,用于连接传感器。共需要 10 个插件,连接 10 个传感器。并且这块 PCB 板还要有一个接线端子,在板子内部与 10 个插件相连,用于后续连接其他装置。通过这块 PCB 板子实现 10 个红外传感器与威纶通 HMI 的连接。最终集线器 PCB 板实图如图 8 所示。

3.6 硬件整体结构
将威纶通与 TF-mini-i 激光雷达模组进行连接,并接通电源,将整个装置置于组装的框架上,进行固定,将电机与模拟的渣土模型相连接,并通过零件进行固定,使电机能够带动模拟的渣土模型转动,最终实现完成整个装置的连接,该系统的硬件整体结构实物图如图 9 所示。启动电机,将上方检测装置接通电源,最终实现土压平衡式盾构机渣土流量测量系统。

4 系统软件编程
软件部分实现功串口通信功能,主要设计思想是能够通过 32 单片机串口进行输出电机转速调节情况,其次能够通过串口助手向单片机发送转速指令,使电机转速能够调节至设定的目标值。首先启动电源,通过 Modbus485 串口发送目标转速,则 PID 控制器发出 PWM 信号,若此时电机转速与目标转速有偏差,则 PID 控制器会根据偏 差重新发送 PWM 信号,进行电机控制,直至电机转速等于目标转速。
电机控制系统由 STM32F103RCT6 主控板、电机和编码器组成。脉冲宽度调制技术简称 PWM 技术,就是用调制脉冲宽度的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而改变平均输出电压的大小,以调节电机转速。由其原理可知,一段时间内加载负载两端的的 PWM 脉冲与相等时间内加载负载上脉冲相等的直流电压等效,那么在时间 T 内脉冲宽度为 t,幅值为 U,其等效直流电压为:

基于威纶通 HMI 和 Modbus 通信的现场总线式传感器数据读取,通过红外传感器测量模拟渣土泡沫的距离,在软件界面图上显示出来,同时使用电脑连接 STM32 单片机,可以通过 Easy Builder Pro 软件对电机转速进行控制。Easy Builder Pro 软件程序如图 10 所示。

5 系统调试和结果分析
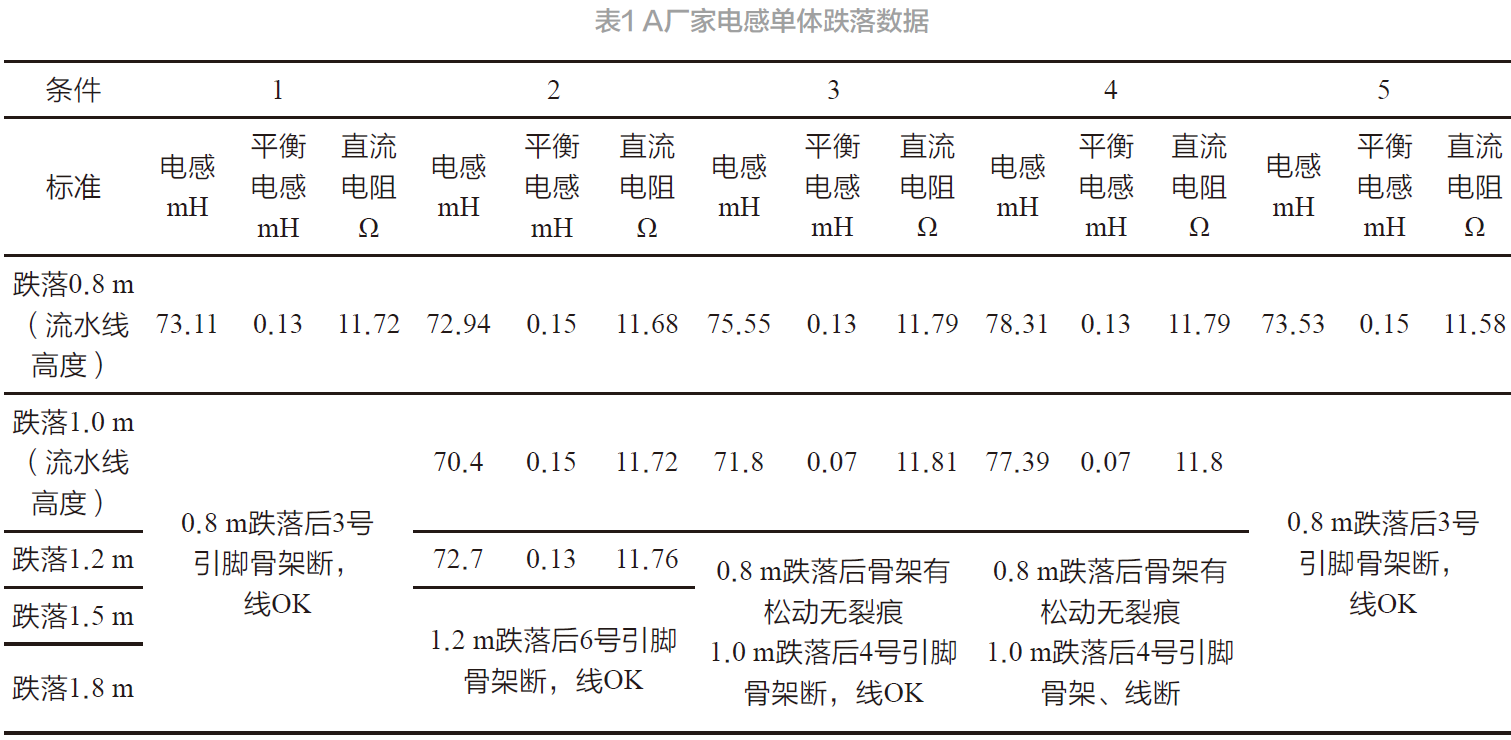
基于威纶通 HMI 和 Modbus 通信的现场总线式传感器数据读取,通过红外传感器测量模拟渣土泡沫的距离,在软件界面图上显示出来,同时使用电脑连接 STM32 单片机,可以通过 Easy Builder Pro 软件对电机转速进行控制。通过 Modbus 协议串口 485 进行串口通信,本文获取调试数据,如表 1 所示。

由上所得测试表可知,当单片机通过串口接收到转速为 5 转 / 秒时,电机转速开始调节,数据如图 11 所示。

上述数据经过 Matlab 进行仿真后,可得出如下曲线示意图。

如图 12 所示,可观察到通过串口发送目标转速后,电机转速开始调节,最终到达目标稳定值。
基于威纶通 HMI 和 Modbus 通信的现场总线式传感器数据读取,通过红外传感器测量模拟渣土泡沫的距离,在软件界面图上显示出来,同时使用电脑连接 STM32 单片机,可以通过 Easy Builder Pro 软件对电机转速进行控制。
在电机转动时,雷达传感器可以测得转动时泡沫的距离。通过泡沫距离计算在瞬时时刻的横截面积。控制电机转动,某一时刻时雷达传感器测量距离为如图 13 所示。

6 结语
为避免土压平衡式盾构机,在推进过程中因出土量的过多、过少引起的超挖或欠挖导致地面隆起或塌陷等情况,设计了土压平衡式顿机构渣土传送带控制系统,通过 STM32F103RCT6 单片机对传送带进行控制,能够实现传送带单闭环 PID 控制电机转速,并且能够通过串口进行发送和读取数据进行传送带的速度,最终实现传送带转速闭环控制。
但是由于驱动原因,当给电机阻力时,驱动无法输出更高的电压给电机,致使电机速度无法被调节,因此可以通过换一个性能更好的驱动来进一步改善实验结果。
(注:本文转载自《电子产品世界》杂志2022年9月期)




评论