
波士顿动力副总裁:机器人一天就学会了芭蕾舞,尚未使用机器学习
新年之前,波士顿动力上传了一段机器人跳舞的视频引爆全网。现在这段视频仅在YouTube平台就已经被观看超过2500万次。
本文引用地址:http://www.amcfsurvey.com/article/202101/422005.htm当初,为了拍摄这段机器人舞蹈,波士顿动力甚至请来了专业的舞蹈指导Monica Thomas和人类舞蹈演员,为机器人设计动作。
在这段视频的背后,还隐藏着哪些技术细节?最近IEEE Spectrum采访到了波士顿动力工程副总裁、Atlas双足机器人团队负责人Aaron Saunders。
Saunders从2003年开始就进入波士顿动力工作,参与了很多早期机器人的开发,比如机器狗LittleDog就是出自他之手。
以下是采访的主要内容。
请来人类舞者指导
IEEE Spectrum:您如何看待网络上对这段视频的反应?
Aaron Saunders:我们对制作的视频抱有不同的期望;对我们来说,这绝对是有趣的。YouTube上的回应刷新了我们的纪录:我们收到了数百封电子邮件和电话,这些人表达了他们的热情,分享了他们对我们下一步应该做什么的想法,比如这首歌怎么样,这个舞蹈动作怎么样,所以这真的很有趣。
我最喜欢的回应是我94岁的奶奶发给我的。她在YouTube上看了视频,然后通过家人发送了一条信息,询问我是否会教机器人这些跳舞动作。我认为这段视频吸引了更多观众,因为它融合了经典音乐和新技术。
我们以前从未见过Atlas有这样的动作,您能谈谈你们是如何做到的吗?
我们从和舞蹈演员和编舞合作开始,通过创作和编排一个套路,来为舞蹈创造一个初步的概念。其中一个挑战,尤其是Atlas面临的核心挑战,是调整人类的舞蹈动作,以便在机器人上表演。

为此,我们使用模拟来快速迭代运动概念,同时征求编舞的反馈,做到在Atlas力量和速度的能力范围之内。这是一个多次反复的过程,他们会说出他们想让我们做什么,工程师会看着屏幕说“这个动作容易”、“这个动作很难”或者“这个动作让我害怕”。
然后我们进行讨论,在模拟中尝试不同的东西,并进行调整,以找到一套兼容的动作可以在Atlas上执行。
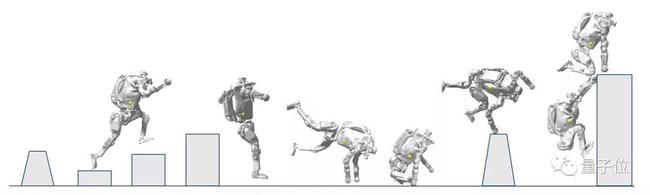
在整个项目中,随着我们构建工具越来越完善,创建这些新舞蹈动作所需的时间变得越来越短。例如,最终我们能够在拍摄的前一天,用工具链在一天内成功创建Atlas的一个芭蕾舞动作。因此,它不是手动编写的,而是有一个可以可以让你设计各种动作的pipeline,你可以通过各种不同的输入来描述,并把它们推送到机器人身上。
如何迁移人类动作
有没有一些动作,特别难从人类迁移到Atlas机器人身上?还是Atlas可以做得比人类做得更好?
芭蕾舞部分的一些旋转动作,需要更多的迭代才能开始运作,因为这些离跳跃和跑步等更有经验的动作相差最远,它们对机器和软件都提出了新的挑战。不要低估人类舞者的灵活性和力量。当你带着优秀的人类舞蹈演员,试图让机器人学着做他们能做的动作,这是一个难题。
从根本上说,我不认为Atlas有这些舞蹈演员所拥有的运动范围或力量,尽管我们继续为此开发机器人。因为我们相信,为了在商业上广泛部署这种机器人,并最终在家庭中部署,我们认为他们需要有这种水平的性能。
机器人真正擅长的是,以完全相同的方式一遍又一遍地做某件事。因此,一旦我们输入了我们想做的事情,机器人就可以一遍又一遍地做,我们会从不同的角度拍摄。

我可以理解你如何使用人类舞者来帮助Atlas完成舞蹈套路,但是你们是如何让Spot机器狗和Handle搬运工一起跳舞的?
我认为,和我们一起工作的人实际上有很多思考运动的天赋,思考如何通过运动来表达自己。我们的机器人动作非常好。我们发现人类舞者与机器人的运动方式是关联的,舞蹈指导会把这些统一起来,不管是两条腿还是四条腿。当你不一定有动物运动或人类行为的模板时,只需要更努力地思考如何去做某事,对于更务实的商业行为也是如此。
你们教机器人跳舞、做体操或跑酷的经历,对你们机器人的商业应用有什么启发?
我们认为舞蹈和跑酷固有的技能,如灵活性、平衡和感知,是各种机器人应用的基础。也许更重要的是,在建立新的机器人能力和享受乐趣之间找到交集,一直是波士顿动力机器人前进的秘诀。
当你让机器人在几天内实现这些动作达到极限时,你会学到很多关于硬件鲁棒性的知识。通过产品化,Spot变得非常鲁棒,几乎不需要维护。一旦你教会它,它就可以整天跳舞。
它今天如此强大,是因为我们从以前奇怪而有趣的事情中学到了教训。你必须进入未知的领域,才能知道你不知道的事情。
两天拍完,未做剪辑
通过观看视频,很难知道这背后需要花费多少时间,以及它们在多大程度上代表了机器人的实际能力。你能谈谈吗?
我试着在这个视频的背景下回答,我认为我们发布的所有视频都是如此。我们努力去做一件事,一旦做成,它就成功了。对于Atlas来说,大多数机器人控制都是来自我们以前的工作,比如在跑酷上做的工作,让我们走上了使用模型预测控制器来考虑动力学和平衡的道路。
我们用这些在机器人上运行一组舞步,这些舞步是我们与舞蹈演员和编舞一起离线设计的。所以,我们花了很多时间,用几个月来思考舞蹈、构思动作、在模拟中迭代。
跳舞需要很大的力量和速度,所以我们甚至升级了阿特拉斯的一些硬件,让它更有力量。舞蹈可能是我们迄今为止所做的最有力量的事情。尽管你可能认为跑酷看起来更具爆发力,但你在舞蹈中的运动量和速度令人难以置信。这也花了我们几个月的时间,让机器拥有与算法一致的能力。
你看到的这段视频,我们只拍摄了两天。大部分时间都花在了研究如何让摄像机在一群机器人中移动,来拍摄连续两分钟的镜头。当我们多次跑着拍摄舞蹈动作时,就可以非常可靠地重复它。
在开场的两分钟镜头中,没有剪辑或拼接。
硬件肯定有一些需要维护的故障,我们的机器人有时会绊倒。这些行为不会被产品化,也不是100%可靠,但它们是可重复的。我们诚实地展示了我们能做的事情,而不是我们曾经做过的事情。我认为,当我们已经取得了一些成就后,是需要诚实的,这对我们来说肯定很重要。
你提到Spot现在已经稳定到可以跳一整天的舞了。那Atlas怎么样?如果你不断更换电池,它也能跳一整天吗?
Atlas,作为一个世界上只有少数几台的机器人,它们很复杂,可靠性不是主要关注点。我们肯定会不时让机器人休息一下。但是硬件的鲁棒性真的很不错。如果没有这种鲁棒性,我们根本无法制作视频。
我认为Atlas更像一架直升机,你花在维护上的时间,相比花在操作上的时间更多。而对于Spot,人们的期望是它更像一辆车,你可以运行它很长时间。
软硬件技术细节
当你教Atlas做新的事情时,它用到了任何机器学习吗?如果没有,为什么?
作为一家公司,我们已经探索了很多东西,但是Atlas现在没有使用学习控制器。我期待有一天我们会的。
Atlas目前的舞蹈表演使用了我们所谓的反射控制,这是对力的反应、在线和离线轨迹优化以及模型预测控制的结合。我们利用这些技术,因为它们是解锁真正高性能的可靠方法,并且我们知道如何很好地使用这些工具。至于这些工具能做到什么,现在我们还没有探索到路的尽头。
我们们计划使用机器学习来扩展和构建我们开发的软件和硬件基础,但我认为我们和社区仍然在努力找出应用这些工具的正确方式。这是我们自然发展的一部分。
目前Atlas的大部分运动来自于它的下半身,但是跑酷也利用了上半身的力量和敏捷,我们最近看到一些概念图片显示,Atlas在做支撑跳跃和引体向上。您能告诉我们更多吗?
人类和动物用腿做的事情很神奇,但是用全身做的事情更神奇。我认为跑酷提供了一个奇妙的框架,让我们能够朝着全身灵活性的方向前进。
散步和跑步只是这段旅程的开始。我们正在经历更复杂的动作,如跳跃和旋转,这是我们过去几年一直在努力的方向。我们下一步是探索如何用手臂来扩展这种灵活性。
我给Atlas团队的任务之一是,像利用腿一样利用手臂,来增强和扩大机动性,我对未来几年要做的事情感到非常兴奋,因为我们将有机会利用Atlas做令人激动的事情。
您对机器人的液压驱动和电驱动有什么看法?
在我波士顿动力的职业生涯中,我曾强烈地感受到不同类型技术的联系。我真的认为这不再是非此即彼的问题。
我认为不同驱动技术的选择,取决于你制造的机器人的大小,你想让机器人做什么,你想让它去哪里,以及其他许多因素。
这两种驱动器都是很好的,我喜欢同时使用。我们已经非常成功地使用了这两种驱动器来制造机器人。
对我来说,液压驱动器和电驱动器之间唯一明显的区别可能在于规模。制造微小的液压设备真的很有挑战性,业内很少有人做这样的事情。相反,这个行业也不倾向于制造大规模的电气设备。所以,你可能会发现,这是两种技术之间的自然划分。
展望
除了你所在的波士顿动力,最近还有什么让你感兴趣的机器人研究?
我真的很喜欢追踪感知、计算机视觉、地形感知方面的进展,这些领域能做的越好,我们能做的就越多。
对我个人来说,我喜欢的是操纵研究,特别是它提高了我们对复杂的、基于摩擦的相互作用的理解,比如滑动和推动,或者移动像绳索这样的柔性物体。我们看到了一种转变,从仅仅捏东西、拿东西、移动和放下东西,到与环境更有意义的互动。
我认为,对这种操纵方式的研究将释放移动操纵器的潜力,我认为这将真正打开机器人与世界互动的丰富能力。
你还想让人们从这个视频中获得什么吗?
我花了这么多时间沉浸在机器人学中,并对机器人是什么,以及它的能力和局限性有着深刻的理解。我有个强烈的愿望是,让更多的人花更多的时间与机器人在一起。
我们在YouTube上看到很多人对视频的意见和想法。在我看来,如果更多的人有机会思考、学习和花时间与机器人在一起,这种新的理解水平,可以帮助他们想象机器人在日常生活中新的用途。我认为这种可能性真的很令人激动,我只是希望更多的人能够踏上这段旅程。











评论