
新雷达技术可让汽车发现拐角处的危险
研究人员开发了一种自动化系统,该系统可使汽车在拐角处感知,并发现迎面而来的交通和行人。
本文引用地址:http://www.amcfsurvey.com/article/202007/414956.htm该系统可以轻松集成到当今的车辆中,使用多普勒雷达将无线电波从建筑物和停放的汽车等表面反射。雷达信号以一定角度撞击表面,因此其反射像母球撞击台球桌的墙壁一样反弹,信号继续击中隐藏在拐角处的物体。某些雷达信号会反射回安装在汽车上的探测器,从而使系统能够看到拐角处的物体并判断它们是在运动还是静止。 普林斯顿大学计算机科学助理教授费利克斯·海德(Felix Heide)说:“这将使汽车能够看到当今的激光雷达和摄像头传感器无法记录的被遮挡的物体,例如,使自动驾驶汽车能够看到危险的交叉路口。” 研究人员还表示,“雷达传感器的成本也相对较低,尤其是与激光雷达传感器相比,并且可以大规模生产。”
在6月16日CVPR2020会议上发表的一篇论文中,研究人员描述了该系统如何区分包括汽车,自行车和行人在内的物体,并测量其方向和迎面驶来的速度。
作者写道:“所提出的方法允许在现实世界中的自动驾驶场景中为行人和骑自行车的人提供碰撞预警,然后再使用现有的直视线传感器看到行人和骑车者。”
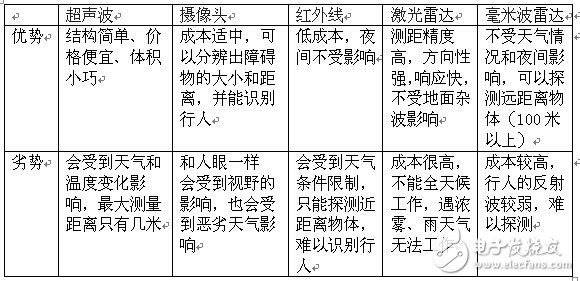
近年来,工程师们开发了各种传感器系统,使汽车能够检测道路上的其他物体。他们中的许多人依靠使用可见光或近红外光的激光雷达或照相机,而这种防止碰撞的传感器现在在汽车中很常见。但是,很难使用光学传感来识别汽车视线之外的物体。在早期的研究中,Heide的团队使用光来观察隐藏在拐角处的物体。但是,这些努力目前尚不适用于汽车,因为它们都需要高功率的激光器并且限于近距离。
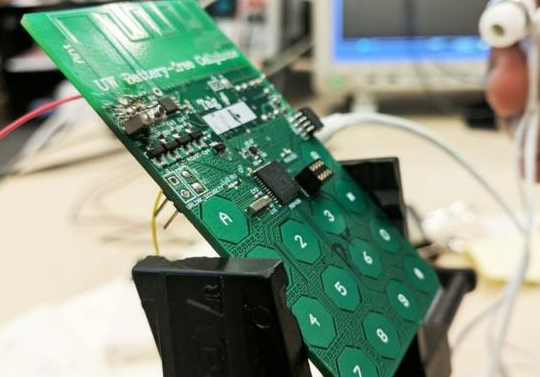
在进行较早的研究时,海德和他的同事们想知道是否有可能创建一个系统,使用成像雷达而不是可见光来检测汽车视线之外的危险。对于雷达系统,光滑表面的信号损耗要低得多,雷达是一种行之有效的跟踪物体技术。挑战在于,雷达的空间分辨率(用于拍摄汽车和自行车等拐角处的物体)相对较低。但是,研究人员认为,他们可以创建算法来解释雷达数据,以使传感器正常工作。
Heide说:“我们开发的算法非常高效,并且适合当前的汽车硬件系统。” “因此,您可能已经在下一代汽车中看到了这项技术。”
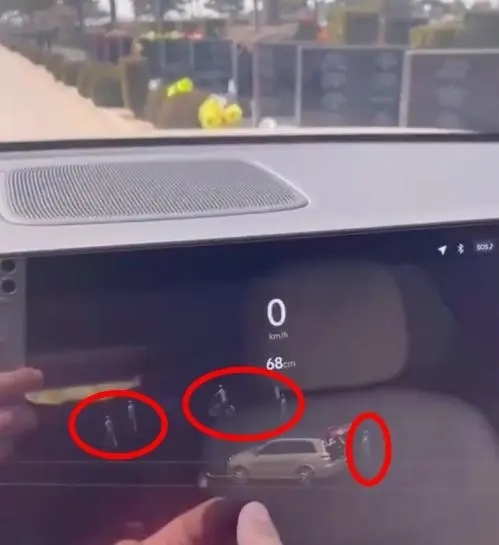
为了使系统能够区分物体,该团队处理了部分雷达信号,即标准雷达考虑的是背景噪声而非可用信息。该团队应用了人工智能技术来完善处理过程并读取图像。计算机科学专业研究生,论文的主要作者之一范凡伟说,运行该系统的计算机必须学会从非常稀疏的数据中识别出骑自行车的人和行人。
“首先,我们必须检测是否有东西。如果有东西重要吗?是骑自行车的人还是行人?” 她说。“那么我们必须找到它。”
她说,该系统目前能够检测到行人和骑自行车的人,因为工程师们认为这些物体体积小,形状和动作各异,因此是最具挑战性的物体。她说,该系统也可以进行调整以检测车辆。
研究人员计划在涉及雷达和信号处理上进一步改进,让该技术能够应用在多个方向。该系统有可能从根本上改善汽车安全性,由于它依赖于现有的雷达传感器技术,因此应该有可能为在下一代汽车中部署雷达系统做好准备。
Heide说:“这肯定会经历非常严格的汽车开发周期。” “在集成和将其推向市场方面,它需要大量的工程设计。但是技术在那里,所以有可能很快在汽车上看到这种情况。”





评论