
关于智能植保(果树)无人机自动控制系统的研究
杨晶晶,宋丹雪(杭州电子科技大学,杭州 310000)
本文引用地址:http://www.amcfsurvey.com/article/201911/407667.htm摘 要:无人机植保的自动化和智能化很大程度上解决操作门槛高的问题,也是推广此项技术的关键。本文构建出一个自动化的寻迹寻址系统,通过GPS定位技术得到果田坐标信息,图像处理技术自动寻找并悬停在每棵果树上,再根据传感器测距技术调整喷洒农药的合适距离,提高了农药喷洒的精准度和安全性,实现了功能的自动化。因为该系统只需用一台有GPS和蓝牙功能的手机即可搜集需要的果田信息,再传输给无人机,无人机即可自动寻迹寻址,所以在很大程度上解放了双手,降低了操作的门槛,有利于无人机植保的推广。
关键词:自动控制系统;GPS定位技术;图像处理技术;算法优化;传感器测距
近年来,果树无人机农药喷洒技术发展迅速。与传统人工施药方式相比,植保无人机喷洒速度效率高,能有效降低人工成本,提高工作效率。由植保机械代替人工喷洒农药将是未来农业的发展趋势。但是目前生产的植保机基本都需要人工手动控制,而操作植保无人机需要较高门槛,果农只能通过将技术人员请上门进行喷洒农药,这样的不便利性造成植保行业无人机推广缓慢。制约我国果树植保行业无人机推广的主要瓶颈问题已由飞行平台与控制系统的稳定性问题转化为无人植保机智能化低、环境感知功能低、操作门槛高、自动化低的问题。完善的自动化寻迹寻址喷洒系统能很大程度上解决操作门槛高的问题。
本文主要利用GPS定位技术、图像处理技术、算法优化、传感器测距技术,构建出一个完善的自动化寻迹寻址喷洒系统。
1 系统构架与工作原理
图1示意了自动化系统总体工作流程,主要由手动记录标记位置、自动规划路线、图像处理、传感器测距几个重要部分组成。
1.1 手动记录标记位置
果树种植多为成排种植,系统第一次使用或新增果树树则需手动记录每排首尾两棵树的(新)坐标。为了使操作更加简便,只需用手机自带的GPS功能,记录所需每排首尾两棵树的坐标,再用蓝牙技术将所有标记点坐标传输到无人机进行下一步的处理。
1.2 自动规划路线
我们将种植果树排的方向规定为y轴,在用标记点坐标确定了农田边界之后,将GPS坐标转换成X-Y坐标。我们得到了关于y轴上的两条边界点集。这两条边界上的点两两一组对应,两点之间即为第n排果树。我们的系统可以容许无人机有任意的起飞地点,然后自动规划最佳路线,并进行精确的、无遗漏的农药喷洒。另外,系统还可以根据边界点的二次修改,自动修改坐标点集,重新规划最佳喷洒路线。
当无人机需要补充农药或者电量不足时,会记住喷洒农药的进度,即某棵果树的坐标点,和此次喷洒任务的路线规划,然后暂停任务,回到补给点降落,停止工作。待补给完成,人工开启此任务,无人机便会回到记忆点继续任务。当然人工也可随时暂停任务。
1.3 图像处理
主要分为两个方面:一是判断果树位置,来调整悬停位置;二是判断果树大小,以确定喷洒农药的多少。规定无人机飞行的大致路线基本与排的方向一致,无人机自载的摄像头将俯拍的图像不断传回微处理器进行处理,根据图像信息调整无人机位置,使其悬停在果树上。再根据图像信息确定果树的生长大小,将信息传到下一步骤。
1.4 传感器测距
根据图像处理传来的果树大小信息,无人机会利用传感器测距技术自动调整喷洒高度及喷洒农药大小进行喷洒,让农药喷洒能更深入而不仅仅浮于表面,减少农药浪费。


2 系统硬件搭配
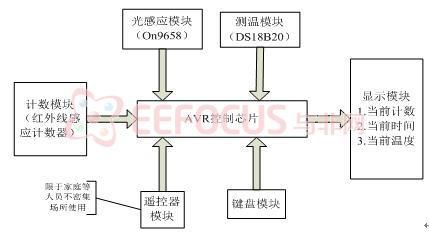
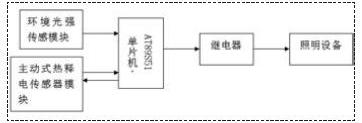
系统的硬件模块基本由图2所示。蓝牙模块将手机里收集的标记坐标传输到无人机上,配合着GPS模块得到的位置信息,图像处理模块得到的树木信息,测距仪得到的高度信息,微处理器处理得到的信息,再给飞控系统发出指令,实现无人机的自动化智能化寻迹寻址喷洒功能。

2.1 飞控
飞行控制器件拟采用大疆N3 AG型号的飞控。作为NAZA飞控系列的最新一代产品,N3多旋翼飞控系统采用DJI最新的控制导航算法,新增的内置双IMU冗余设计,可实现数据实时互为备份,结合全新内减震结构设计,赋予飞行器高可靠性;“黑匣子”数据记录系统为飞行性能分析提供精准数据支持,同时,对于包括Lightbridge 2和 DJI Assistant 2等在内的一系列DJI配件、高性能软件、SDK和A3 Upgrade Kit高性能导航模块的支持,可帮助飞行器实现丰富的应用扩展。
2.2 微处理器
主控器件STM32F103单片机使用的是ARM 公司为要求性能高、成本低、功耗低的嵌入式应用专门设计的32位的ARM Cortex-M3内核。拥有可达128 kB的嵌入式闪存、20 kB的SRAM 和十分丰富的外设:两个1μs的12位ADC,1个全速USB(OTG)接口,1个CAN 接口,3个4 M/S的UART,2个18 M/S的SPI,2个I 2 C等。内部还集成了复位电路、低电压检测、调压器、精确的RC振荡器等该系列单片机不仅功能强大而且功耗相当低,在72 MHz时消耗36 mA(所有外设处于工作状态),相当于0.5 mA/MHz,待机时下降到2μA ,是32位市场上功耗最低的产品。STM32F103系列单片机丰富的I/O 接口可以与传感器模块进行高效通信,用其做主控制器可以减少使用器件从而简化使整体电路,很好地达到降低EMS成本的目标。
2.3 数字信号处理器
TMS320x24x系列数字信号处理器是TI公司推出地一种面向数字马达控制、嵌入式控制系统和数字控制系统开发的新型可编程DSP芯片。LF2407是x240x系列DSP控制器性能最强、片上设施最完备的一个型号,被广泛用于代码开发、系统仿真及实际系统中,其主要特点:
1) 采用高性能静态CMOS技术,使得供电电压降为3.3 V,减小了控制器的功耗;30 MIPS的执行速度使得指令周期缩短到33 ns(30 MHz),从而提高了控制器的实时控制能力。
2) 两个事件管理器模块EVA和EVB,每个包括:两个16位通用定时器;8个16位的脉宽调制(PWM)通道。适用于控制交流感应电机、无刷直流电机、步进电机和逆变器等。
3) 10位A/D转换器最小转换时间为500 ns,可选择由两个事件管理器来触发两个8通道输入A/D转换器或一个16位通道输入的A/D转换器。
2.4 测距传感器
夏普的GP2Y0A02YK0F距离测量传感器模块。它由PSD(position sensitive detector) 和IRED (infraredemitting diode) 以及信号处理电路三部分组成。由于采用了三角测量方法,被测物体的材质、环境温度以及测量时间都不会影响传感器的测量精度。传感器输出电压值对应探测的距离。通过测量电压值就可以得出所探测物体的距离,所以这款传感器可以用于距离测量、避障等场合。
2.5 蓝牙
无人机蓝牙采用HC06型号蓝牙。此模块遵循蓝牙2.0协议,支持SPP蓝牙串口协议,支持UART接口。成本低兼容性好,功耗低。可使无人机与电脑、蓝牙主机、手机等智能终端配对。宽波特率范围4 800~1 382 400,兼容5 V/3.3 V单片机系统,宽电压供电3.3 V~5.5 V。连接飞控,需要修改波特率为115 200,命令为AT+BAUD8。
3 系统详细设计
3.1 形成二维坐标模型
将果田视为一个矩形,将种植果树排的方向规定为y轴,矩形的两条长或宽边上的每颗果树坐标信息已知,并分别存入两个集里面,一一对应。为了给无人机更简明的工作指示和给果农更好的信息反馈,我们的系统将自动形成一个更规整的二维坐标模型。

3.2 自动寻迹设计思路
无人机起飞,GPS自我定位,确定离无人机最近的一个边角点,作为此次任务的起点,并自动飞行至该点。例如图中,最近距离红线标注,起点为(m-1,1)。

此次任务喷洒路线规划按如图所示,蛇形飞行,最后回到原点。其中每一排由横坐标最小和最大两个边界点坐标定位,即若一排上新增果树,自动判定新边界点并删除旧边界点。其间的果树通过连续拍摄图片,提取图片信息,精确获取果树位置,实时微调无人机喷洒位置。

中途没电或农药不足,记下当前坐标(m-2,3),回到原点补给,之后返回(m-2,3)点,继续此次任务。

3.3 图像识别
采用ARM微处理器的STM32F103芯片进行图像处理,图像处理的程序在Keil uVision4环境下通过C语言实现。
先将采集到的图像进行灰度转换。在程序编写中先通过公式计算像素亮点值,再将得到的结果赋值给R、G、B三基色,即可将彩色图像转化为灰度图像。再将图像阈值化分割。将图像二值化,即把图片中的树与空地分别出来。理想的二值化图像是目标物(果树)为纯黑色,背景(空地)为纯白色。数学上可描述为:

这里的T是阈值,将T值用于整幅图像,进行全局阈值化。在一个坐标为 (x,y)的点对 T 值的选取依赖于围绕 (x,y)的领域中所有像素值的统计特性,这个过程称为局部或区域阈值化。
图像处理好后,识别图像中果树的位置,以调整无人机的悬停位置;识别图像中果树的大小,将信息传向下一个模块。
3.4 传感器测距
在无人机确定了需要喷洒的果树位置,并从上空移动到该位置之后,红外线测距模块将会启动。我们的无人机运用了夏普GP2Y0A02YK0F型红外测距传感器,当无人机下降去靠近果树时,在离果树20 cm~150 cm之内,此模块输出电压将会随着距离的减小而增大。因此无人机可以自动下降到喷洒农药的最佳位置,进行对果树的农药喷洒。

4 结论
本文运用GPS定位技术、图像处理技术、算法优化、传感器测距技术,提出一种自动化系统取代人工遥控植保无人机进行喷洒农药。降低了植保无人机使用的门槛,同时也大大减少了人工成本和农药浪费量。
参考文献
[1] 郭大山,于艳,李壮,等.基于激光雷达的果树植保机空中避障系统设计[J].山东工业技术,2017:161-162.
[2] 张得明,高龙琴,陈金豹,等.一种基于ARM的割草机器人边界图像处理方法设计研究[J].电气与自动化.2017:166-169.
[3] Data Sheet of TI TMS320x24x.[Data Sheet].
[4] Data Sheet of Sharp GP2Y0A02YK0F.[Data Sheet].
[5] 用于小面积农地果树的智能植保无人机系统的研究与推广[R].杭州:杭州电子科技大学,2018.
本文来源于科技期刊《电子产品世界》2019年第12期第37页,欢迎您写论文时引用,并注明出处。




评论