
基于多旋翼无人机的标示线绘制与维护系统
作者 刘欢1,张顺2,邹亚男3,张晓利4(指导教师)(1.内蒙古科技大学 信息工程学院电子信息工程,内蒙古 包头 014000;2-4.内蒙古科技大学 信息工程学院自动化,内蒙古 包头 014000)
本文引用地址:http://www.amcfsurvey.com/article/201901/397278.htm摘要:本文介绍了一种基于旋翼无人机的交通、场地标示线绘制与维护的系统。这套系统能够根据预设信息实现标示线的绘制,并且能够检测标示线的损耗与有效性来判断何时进行智能维护。这套系统在常规无人机上搭建了基于Open CV的视觉模块、喷料箱以及可更换喷头无刷水泵。视觉模块识别到标志物后将信号传送给Cortex-M4核的XMC4700处理器,XMC4700根据预设指令将标志物的位置信息与无人机对比,匹配合适的路径,然后将飞行指令传送给N3飞行控制系统。无人机随着标志物位置的改变而改变,从而完成标示线的绘制。维护模式下,放出无人机,无人机识别道路标示线循迹飞行,通过标示线与周围环境对比度的不同判断标示线的磨损情况,从而判断是否需要修补或重新绘制。
*2017-2018年度“英飞凌杯”全国高校无人机创新设计应用大赛全国总决赛二等奖
引言
多翼飞行器具有体积小、重量轻、灵活度高、稳定性强的特点,适用多种空间场所,随着无人机市场和技术的飞速发展,现在无人机的作业精度和抗干扰能力已经能执行各种复杂环境的特种任务,减少了人工作业的劳动强度和时间,节约了成本,提高了作业效率。
基于多旋翼无人机的标识线绘制与维护系统能够根据预设参考点移动作业,或者将一些像篮球场、足球场等需要大量绘制的标准场地信息写入无人机程序内,快速完成特定标示线的绘制。随着我国经济的高速发展,公路增长极为迅速,因此公路车道的划线工作十分繁重。目前,国内普遍采用人工划线,工作速度慢,劳动强度大,已不能满足当前形势发展的需要。所以,基于多旋翼无人机的标识线绘制与维护系统也是高等级公路养护机械中急需开发的产品之一。基于这种背景,本项目通过无人机喷射的方式完成标示线绘制的工作
1 无人机整体结构
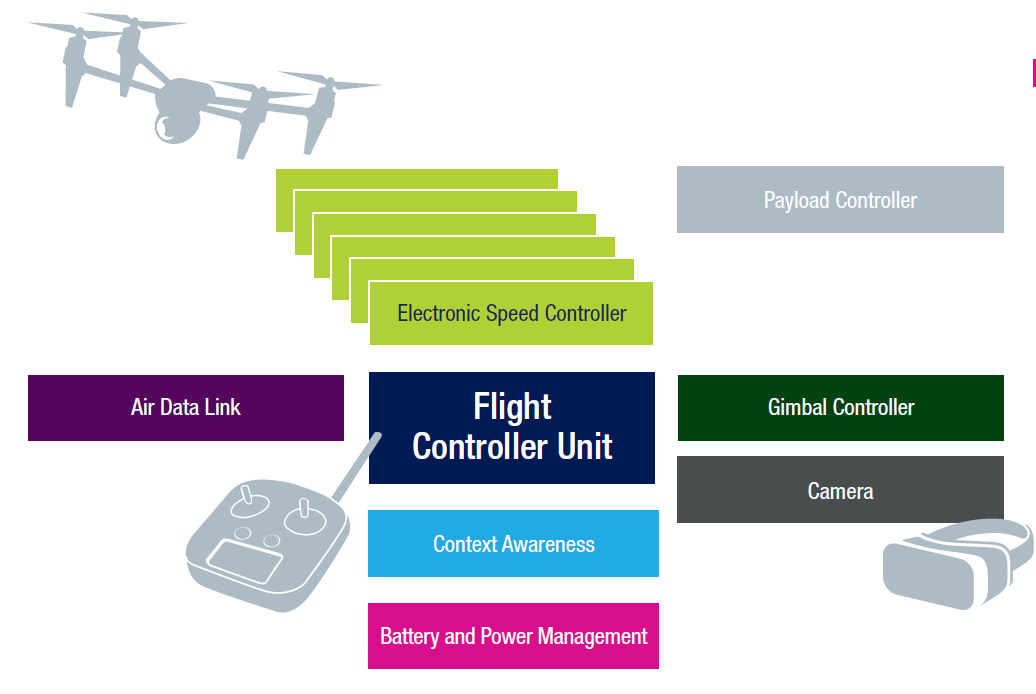
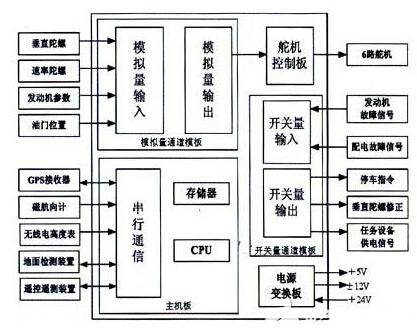
无人机的整体模型如图1所示,配置如图2所示,以基于Cortex-M4内核的英飞凌工业级单片机XMC4700为主控系统,飞行姿态的控制采用拥有API接口的大疆N3飞行控制系统。飞行动力方面使用了IRMCF183电调板和朗宇2212 KV880无刷电机,来保证飞行动力和负载能力的充足。为保证无人机作业精度和飞行的稳定性,除了N3飞行控制系统自带的双冗余MCU以外,本项目还采用DPS310高精度气压计来进一步精确控制飞行高度。对于一些复杂路况下的作业任务,我们需要考虑一些障碍物的规避情况,对此采用了英飞凌公司的厘米级精度的测距雷达,以保证对于障碍物的及时规避。基于多旋翼无人机的标识线绘制与维护系统的核心在于图像信息的的识别与采集,我们采用了基于Open CV的边缘识别与灰度对比技术,完成对标志物距离的检测,从而将无人机精准地引导到喷绘位置执行喷绘操作。为了保证喷绘质量,我们采用无刷电机水泵作为喷头动力来源,通过XMC4700控制器的PWM控制通道控制IRMCF183电调板,进而达到精确控制电机转速和喷头速度,我们还将搭配可更换喷头用来适应不同的喷绘任务。


2 避障与报警
飞行器配备高精度雷达模块,具备定高和避障的功能。在满足工作条件的情况下,雷达模块与测高模块的组合可预测飞行器距离前方、后方的高度,使飞行器在执行喷绘作业时保持与作业面的相对高度不变,进行仿地飞行,以确保喷头喷绘的均匀性。同时,雷达模块可检测最远30 m处的障碍物,并进行避障,保障作业安全。雷达功能默认开启,避障功能在所有作业模式下均可使用。
2.1 避障功能使用
避障功能的使用分为以下两种场景:飞行器距离障碍物较远时,将会在距离5 m处时才开始减速,直至距离障碍物约2.5 m处悬停。飞行器距离障碍物较近时,将会立即紧急刹车至悬停。
2.2 警报
当喷料箱中喷料或剩余电量到警告值时,无人机将中断作业并返航,根据需要设置为就地降落或者降落至记录点。
无人机喷料箱报警时,启用补给程序返回补给点补给,完成补给任务后无人机返回任务中断处继续作业。
2.3 补给点
返回补给点可通过主控的消耗报警设置或者拨动返航按键启动,返航时遥控器不能进行其他操作。
2.4 强制退出
为了应对失控或者外物入侵的情况,我们设立了强制退出按钮,一旦出现突发状况可以直接强制停转螺旋桨,牺牲无人机来避免更大的损失。
3 工作模式与工作流程图
3.1 环境信息收集作业模式
将无人机工作模式设置到智能飞行模式,通过电脑设置环境信息收集模式,选择开阔或者封闭模式,然后调整场地粗略参数,封闭模式下,直接放出无人机,无人机沿任意方向飞至边缘处(如墙体)然后沿边缘飞行并记录飞行数据,开阔模式下根据调整后的作业半径,无人机将在飞至作业半径处进行螺旋向内飞行,收集环境信息。
无人机将收集到的环境信息通过无线模块传输至电脑,然后进行场景数据的处理,最后在场景上显示出施工场地的测量参数。

3.2 预设参数喷绘作业模式
通过无人机反馈的场地数据进行工程设计,设计规划好喷绘作业任务后,将图案参数输入给PC端软件,软件里进行参数对比,将后期规划的场地与前期的收集场地信息对比,确认无误后,将无人机工作模式设置到智能飞行模式,以执行喷绘任务,无人机飞行至任务起始点开始喷绘。如果电量和剩余喷料量到达警戒值后启用补给程序,会在下一个喷绘断点处终止作业,返回补给点补给;如果没有断点处将继续进行喷绘任务,直至到达二级警报点直接返回。完成补给任务后,无人机返回任务中断处继续作业,直至完成喷绘任务。
无人机在进行喷绘任务时,会通过视觉模块检查喷绘质量,通过调整飞行速度、喷头速率、飞行高度来提高喷绘质量。
3.3 智能寻迹飞行喷绘作业模式
让无人机收集一段施工场景的信息,反馈至电脑端,用户自行选择合适的标志物(如路牙石)之后设定无人机与参考物的距离、工作范围,然后将参数指令传送给无人机,将无人机工作模式设置到智能飞行模式执行喷绘任务,无人机飞行至任务起始点开始喷绘,如果电量和剩余喷料量到达警戒值后启用补给程序,会在下一个喷绘断点处终止作业返回补给点补给,如果没有断点处将继续进行喷绘任务直至到达二级警报点直接返回。完成补给任务后无人机返回任务中断处继续作业直至完成喷绘任务。无人机将一直巡线飞行喷绘,直至完成工作区间的飞行喷绘任务。
3.4 全手动喷绘作业模式
全手动喷绘模式下没有自动避障功能,所以需要一定的无人机飞行技巧才能够进行作业,此模式下会有喷料剩余量与电量剩余提示,在电量二级警戒值时无人机将自动原地降落(不建议使用到二级警戒值)。可以通过手动操作无人机进行无人机的飞行运动,同时通过喷口控制开关和喷头速率旋钮来进行控制喷绘作业。
4 赛后感言
经历了一年的比赛在2018年8月1日画上了句号,这篇文章也算是我们对所做项目的一个总结。2017年9月,因机缘巧合加入了这场比赛,以前从来没有接触过无人机的我们在拿到英飞凌公司提供的器件时可谓是一脸茫然,做什么?怎么做?脑子里产生了一连串的问号,各种百度、各种玩家DIY经验,都被我们当作是一本教科书。慢慢熟悉,点滴进步,有道是“失败是成功之母”,在炸机无数次、无数次试飞失败、无数次改正后,功夫不负有心人,一步步从初赛、复赛,迈入了决赛的大门。在这期间非常感谢英飞凌公司的各种帮助,如果没有英飞凌工程师的倾心相助,也许我们会走更多的弯路。心存希望,幸福就会降临你;心存梦想,机遇就会笼罩你;心存感恩,贵人就会青睐你。
参考文献
[1]Rafael C.Gonzalez. Digital Image Processing (2nd Edition),2003.
[2]OpenCV-Python官方教程中文版,2014.
[3]新版道路交通标志和标线实用手册.
本文来源于科技期刊《电子产品世界》2019年第2期第71页,欢迎您写论文时引用,并注明出处











评论