
CAN总线、以太网还是FPD链路:哪一种最适合车载通信?
引言
本文引用地址:http://www.amcfsurvey.com/article/201809/388254.htm1915 年,福特汽车公司把电灯和电子喇叭用于其T -型汽车。自那时起,汽车对于电气和电子系统的依赖便不断增加。初始系统往往都是局部和独立的,例如,一个控制车头灯的开关直接连接至电池。但在今天-,这些系统都相互连接在一起。当车头灯开启时,仪表盘照明、后视镜和其他系统可能都会转入新的工作状态。为了实现这些功能,各种系统必须彼此相互通信。随着汽车技术的发展,汽车拥有了许多网络,让这种通信成为可能。由于自动驾驶汽车的不断发展,对于汽车内部和汽车之间进行数据传输的需求日益增长。本文为您介绍三种汽车通信标准—控制器局域网(CAN) 、以太网和平板显示链路 (FPD-Link) ,并探讨每种接口最适合的系统。
CAN总线最初于20世纪80年代由Robert Bosch GmbH 制订。今天,它得到许多集成电路和子系统制造厂商的支持,并应用于所有现代汽车中。CAN总线允许通过总线上传输的消息,让总线上的不同控制器或者处理器进行相互通信。它使用一种优先次-序方法,这样低优先级的消息便不会干扰高优先级的消息。CAN总线的传输速率小于1 Mbps,消息长度(CAN帧)通常为50到100 比特。
由于许多不同控制器可以共用一条CAN总线,因此它一般不太适合发送要求每秒进行约100 次以上更新的消息。理想情况下,它适合于转播更缓慢的状态更新,从传感器到引擎控制单元。它所包括的应用为与其他机械系统相关的通信(变速器、制动、巡航定速控制、动力转向、车窗、门锁等等),其数据量有限,并且涉及带宽往往相对较低。
由于越来越多的传感器和处理器不断被加入到这个网络中,总传输速度进一步降低,汽车系统变得更加复杂。图1显示了用于实现车门和温度控制功能的CAN 总线。由于所有这些都是低带宽应用,因此相互干扰并不是一个大问题。但是,如果同一条总线还要处理更高的带宽,如引擎控制等更重要的功能,则需要把车门和温度控制的优先级设为足够的低,以使这些功能不干扰引擎控制。
最终结果是,CAN总线同样适合于作为汽车机械传感器和系统之间的一个通信网络,但它很难达到如娱乐系统或者摄像头或雷达传感器等应用的高带宽要求。
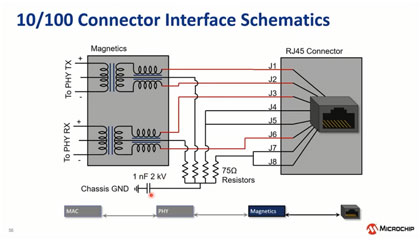
以太网是我们家里和办公室最为常见的高速接口之一,一些汽车通过以太网来传输各种高速数据。与CAN总线一样,以太网是一种打包分组系统,网络各-部分上节点之间的信息以包的形式传输。同CAN总线一样,以太网为双向网络,随着系统节点数量的增加,所有单条链路的传输速度随之下降。但是,以太网传输数据的链路速度是CAN总线的100 倍。
以太网适合于应用中中等带宽通信,例如:导航系统与控制等。它能够以相同的方法用作CAN总线,并同时提供更多的带宽。以太网是代替CAN总线的一个理-想选择,但是由于以太网的每节点成本较高,因此它可能不会取代CAN总线,而会作为CAN总线的补充。
今天,一些汽车正在将以太网用于满足大数据传输要求,例如:车尾摄像头和娱乐系统等。汽车应用中特别需要提及的是德州仪器公司(TI)的DP83848Q-Q1 。它是一种以太网PHY (归为AEC-Q100 2 级),包括一个辅助系统诊断的回路测试。
要想通过以太网网络传输视频,即使传输的视频通道只有一条,也必须在其源头对视频进行压缩,然后在目的地解压缩,以避免超出以太网带宽限制。就如车尾摄像头等应用而言,意味着摄像头内部需要有一颗相对高功耗的处理器,以对图像进行充分的压缩,使其能够通过以太网传输。也就是说,摄像头的物理尺寸更大,成本更高,并且与不要求更多图像压缩工作的解决方案相比,它的功耗也更高。这种解决方案的-另一个缺点是,视频压缩和解压缩增加了链路的延迟。如果同一条以太网被汽车内数个摄像头或者其他视频-源共用,则需要在压缩量(以及相应的视频质量)和支持视频通道数目之间做出折中与平衡。利用分层结构,在汽车内建立起多个网络,可以缓解这个问题。-一个网络仅处理引擎控制和诊断程序,第二个网络处理汽车后排娱乐和音频系统,而另一个网络则处理驾驶辅助功能,例如:视线增强摄像头等。最后,以太网拥有比CAN总线更强的功能,代价是更高的复杂度,并且仍然很难应对最高带宽应用(例如:视频等)。-
FPD 链路是一种专为高带宽数据点对点传输而开发的技术。它拥有一条速度非常高(每秒几千兆比特)的正向通道,以及一条低速反向通道。反向通道用于以400 kbps 速率传输I2C,或者以1 Mbps 的最高速率控制GPIO。开发FPD链路的目的是在汽车内部传输视-频数据。例如,它可以用于把未经压缩的视频传输至视频显示器,而反向通道则把显示屏触摸板的信息发回给产生该视频的处理器。FPD 链路的物理层可以是一条双绞线或者同轴线缆。布线为专用,所以,如果FPD 链路用于车尾摄像头,则一条线缆从车尾摄像头连接至处理器,另一条线缆从处理器连接至车载显示-器。
本应用中,使用FPD 链路的重要好处是,摄像头和显示器都可以是十分简单的一些电路,因为不要求使用压缩和解压缩。另外,由于该链路为专用,因此视频系统的图像质量与汽车内其他部分无关。反向通道可用于结构摄像头,操作变焦镜头,或者把触摸屏信息发回控制器,无需中断正向通道的视频流。
就自动驾驶汽车而言,另一个重要的因素是链路的延迟量。压缩和解压缩图像所要求的处理工作,会增加这种延迟。对于如后排娱乐等应用而言,从DVD 读取数据和在屏幕上显示其内容之间的延迟并不是很重要。但是,如果所传输的图像来自摄像头,显示的是公路上行人的情况,则这种延迟可能就会造成可怕的后果。
当高带宽和低延迟是最为重要的考虑因素时,应首选FPD链路来实现一些重要的连接。另外,由于可以支持反向通道,并且能够通过单条双绞线对或者同轴线连接来供电,因此布线更加简单。图2显示了一个OMAPTM视频处理器,它连接两个不同的摄像头和显示器,通过单条双绞线对线缆连接外围设备。这种双绞线对线缆支持摄像头视频数据和触摸屏/摄像头设置数据。它还为显示器或者摄像头供电。由于每条链路专用于一个外围设备,因此两个摄像头的信号之间不会出现干扰。
结论
那么,哪种接口最适合于汽车通信呢?它们都适合,但需根据具体的用途来确定。CAN 总线在用于那些要求不断降低成本的低速控制应用中占据统治地位。当带宽要求提高时,以太网作为一种增强型接口,可满足中等带宽要求。当要求最高带宽和最低延迟链路时,例如:为自动驾驶程序提供周围环境情况的环视摄像头系统,则FPD链路完全可以满足要求。










评论