
基于混合优化的车载三轴光电跟踪策略
摘要 由于存在一个冗余横倾轴,三轴光电跟踪系统能够解决两轴光电跟踪系统的跟踪盲区问题,实现针对目标的全空间跟踪。针对车载三轴光电跟踪系统,在分析系统运动学特性的基础上,建立了系统的运动学模型,并提出一种基于混合优化算法的车载三轴联动全空间光电跟踪策略。通过对系统运动学模型的研究,分析三轴转动角度之间的关系,从而将三轴转角增量组合的三变量优化问题简化为求解单变量最优问题,然后应用混合优化算法得到最优的三轴角增量组合。仿真和实验结果证明,所设计的三轴跟踪策略可以得到更小的三轴转动角增量组合,能够实现车载三轴光电跟踪系统的三轴联动全空间连续跟踪运动,提高了系统的跟踪性能,具有良好的实际应用价值。
本文引用地址:http://www.amcfsurvey.com/article/201808/388160.htm光电跟踪系统由于具有较高的时频域分辨率,良好的抗电磁干扰能力,优越的夜间观察功能和环境适应性,因而在低可观测性目标探测、高分辨率目标识别等领域具有较大的潜力。目前,光电跟踪系统在精确制导、火控和瞄准等军事应用领域均具有广泛应用,受到普遍关注。同时,随着对光电跟踪系统要求的不断提高,特别是光电跟踪系统自身机动性的要求,基座固定于大地的光电跟踪系统已不能满足使用要求。因此,发展运动平台光电跟踪系统成为当前研究的内容。
两轴光电跟踪系统不可避免地存在跟踪盲区。三轴光电跟踪系统由于存在一个冗余的自由度,可以避免两轴光电跟踪系统的跟踪盲区问题,实现全空间无盲区跟踪。然而,系统中冗余自由度的存在使得三轴光电跟踪系统的测量值与空间位置呈现多对一的特性,从而决定了跟踪策略的多样性和复杂性。现有的三轴跟踪策略大多是依靠切换方法,其实质是两种不同的两轴跟踪策略组合,系统虽然是三轴结构,但是未能实现三轴联动跟踪,而且切换过程会不可避免地增大系统跟踪误差,从而降低系统的跟踪精度和可靠性。
目前也有应用优化方法设计的三轴跟踪策略。文献给出了一种基于粒子群算法的三轴跟踪策略,然而,其中的部分跟踪结果与俯仰-横倾式两轴跟踪系统相同,未真正地实现三轴联动跟踪;同时,单纯应用粒子群算法存在早熟收敛,后期迭代效率低等缺点。因此,其优化跟踪策略寻优时间长,实用性较低。
基于以上原因,本文设计了一种车载三轴光电跟踪系统。同时,在分析系统运动学特性的基础上,提出一种快速混合优化算法,将此优化算法应用于三轴联动跟踪策略的研究中,求得目标在不同位置时满足跟踪要求的三轴角增量组合,并通过仿真实验验证此跟踪策略的有效性和实用性。
1 车载三轴光电跟踪系统运动学特性分析
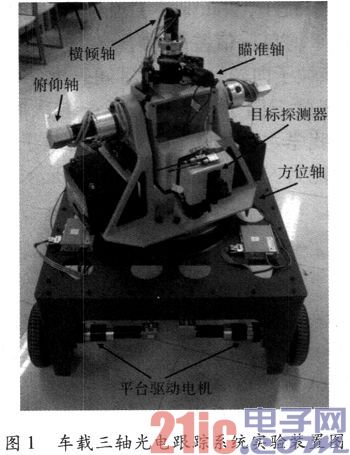
图1为自主设计的车载三轴光电跟踪系统实验装置图。系统的工作原理为:三轴光电跟踪系统安装于沿水平面运动的车载运动平台,空间目标的位置由目标探测器(CCD)测得;然后通过方位轴、俯仰轴和横倾轴的转动,使得瞄准轴对准目标,以实现系统的跟踪功能。
三轴光电跟踪系统各转动轴的转动方位如图2所示。以大地坐标系为参考坐标系,原点为Oa,车载平台所在位置为O。在某当前时刻,车载平台的当前平移坐标在原坐标位置为(m,n,0),转动角度为α。设目标原始坐标为(xa,ya,za),则原始坐标(xa,ya,za)和当前车载平台坐标(x,y,z)的转换关系为

初始状态时,系统方位轴和横倾轴与z轴重合,俯仰轴与x轴重合,瞄准轴与y轴重合。设目标与O的距离为yd,根据四元数定义,三轴光电跟踪系统在参考坐标系下的零位瞄准轴矢量为R0=ydj。首先绕方位轴转动角度为φ,得到瞄准轴矢量R1,描述转动的四元数为q1;再绕俯仰轴转动角度为θ,得到瞄准轴矢量R2,描述转动的四元数为q2;最后绕横倾轴转动角度为ψ,得到瞄准轴矢量R3,描述转动的四元数为q3,其中

对于三轴光电跟踪系统,通过目标探测器可获得目标原始位置ra(xa,ya,za),并通过式(1)转换为当前位置r(x,y,z),而系统的三轴初始转角(φ,θ,ψ)为可测值。因此,为使三轴光电跟踪系统瞄准目标当前位置r,三轴光电跟踪系统的三轴执行角可由3个角位置增量(△φ,△θ,△ψ)完成,其关系如式(4)所示。

通过分析可看出,式(4)为冗余方程。因此,在三轴光电跟踪系统中,由于冗余横倾轴的存在,当转动前后的指向位置和目标位置已知时,三轴角增量的转动角度组合可有无数个,因而必须采用优化方法以求解最佳的三轴转角增量组合。
由于三轴光电跟踪系统的最终目标是使系统瞄准轴对准跟踪目标,为使三轴光电跟踪系统可以在最短时间内跟踪目标,将其优化目标设定为
minJ0=|△φ|+|△θ|+|△ψ| (5)
求取三轴角位置增量(△φ,△θ,△ψ)的过程本质是三变量优化问题。由于式(4)为冗余方程,因此根据式(4),可用角增量△θ将其他两个角增量△φ和△ψ表示出来,分别如式(6)和式(7)所示。

式(7)中
将不满足式(9)的角度增量值舍去,并代入式(5),得到满足要求的三轴角增量组合。
在满足对准目标的前提下,结合式(6)、式(7)和式(9),将式(5)所示的优化目标转化为由△θ表示的函数
minJ(△θ)=|△φ(△θ)|+|△θ|+|△ψ(△θ)| (10)
通过以上方法,将三变量优化问题简化为单变量优化问题,可以简化算法的优化步骤,缩短算法的优化过程,提高优化算法的快速性。
2 基于混合优化的车载三轴联动跟踪策略
2.1 混合优化算法
PSO算法是一种基于迭代的智能优化工具,其算法收敛快、鲁棒性好、通用性强,特别适合工程应用。然而,PSO算法存在早熟收敛,而且后期迭代效率不高。因此,针对PSO算法的以上缺点,对PSO算法进行自适应改进,并引入遗传算法中的交叉和变异思想,提出一种混合优化算法,以提高算法的全局搜索能力,防止早熟收敛,改善算法的优化性能。
其中,w为惯性权因子;c1和c2为正的学习因子;r1和r2为[0,1]之间均匀分布的随机数。
算法的改进描述如下:
(1)通过对惯性权因子w的非线性递减,以改进算法的收敛性能,其表达式如下
其中,wmax和wmin分别为w的最大值和最小值;f为粒子当前的目标值; 和fmin分别为当前所有粒子的平均目标值和最优目标值,T为当前迭代次数,T0为总迭代次数。
和fmin分别为当前所有粒子的平均目标值和最优目标值,T为当前迭代次数,T0为总迭代次数。
通过式(12)可看出,惯性权因子w随着迭代次数的增加而减少,因此,算法前期搜索范围大,全局搜索能力强,算法后期迭代效率高,收敛速度快。而且,当各粒子的目标值趋于一致或者趋于局部最优时,使得惯性权重增加,加大了搜索范围,提高了全局搜索能力;当各粒子目标值比较分散时,使得惯性权重减小。同时对于目标的目标值优于平均目标值的粒子,对应的惯性权因子较小,从而保护了该粒子;反之,对于目标目标值比平均目标值差的粒子,对应的惯性权因子较大,使得该粒子向较好的搜索区间靠拢。
(2)对于学习因子c1和c2,当c1较大时,粒子具有较大的自我学习能力;当c2较大时,粒子具有较大的社会学习能力。因此,其表达式如下所示

其中,c1,ini和c2,ini分别为c1和c2的初始值;c1,fin和c2,fin分别为c1和c2的迭代终值;T为当前迭代次数;T0为总迭代次数;λ为给定参数。
通过式(13)可以看出,在优化初期,粒子具有较大的自我学习能力和较小的社会学习能力,加强了全局搜索能力;在优化后期,粒子具有较小的自我学习能力和较大的社会学习能力,有利于收敛到全局最优解。
(3)对目标值优于平均目标值的粒子保持不变,以保护优秀粒子;同时,对于目标值劣于平均目标值的粒子,执行交叉和变异操作,其具体步骤如下。
交叉:对于目标值劣于平均目标值的粒子,将其与全局最优粒子Gbest交叉,取子代目标值最优的粒子代替当前粒子。其交叉概率为

其中,f为粒子当前的目标值;和fmax分别为当前所有粒子的平均目标值和最差目标值;Pcmax和Pcmin分别为交叉概率的上下限;μ为设定常数。
变异:对于目标值劣于平均目标值的粒子,进行变异操作。其变异概率为
其中,f为粒子当前的目标值;f和fmax分别为当前所有粒子的平均目标值和最差目标值;Pmmax和Pmmin分别为变异概率的上下限;η为设定常数。
从式(14)、式(15)两式可以看出,粒子的目标值越差,其交叉概率和变异概率越大。因而,通过以上交叉和变异操作,不但可以提高种群的多样性,加快算法的收敛速度,而且可以避免早熟收敛,提高算法的全局搜索能力。
2.2 三轴混合优化策略
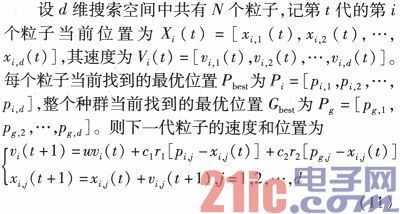
将混合优化算法应用于求解式(10)三轴角增量组合的优化问题中,算法流程如下。
Step1随机初始化粒子△θ的位置与速度,计算不同△θ所对应的不同J值,将粒子△θ的Pbest设置为当前位置,Gbest设置为初始群体中最小J值所对应的△θ值。
Step2对于所有粒子△θ,执行操作:(1)根据式(11)~式(13)更新粒子的位置与速度。(2)计算各粒子△θ对应的目标值J,更新个体最优位置Pbest和群体最优位置Gbest。
Step3对目标值优于平均目标值的粒子保持不变;对于目标值劣于平均目标值的粒子,执行交叉和变异操作:(1)根据式(14)将其与全局最优粒子Gbest交叉,取子代目标值最优的粒子代替当前粒子。(2)根据式(15)进行变异操作。(3)计算各粒子△θ对应的目标值J,更新个体最优位置Pbest和群体最优位置Gbest。
Step4判断算法收敛准则是否满足式(10),若满足,执行Step5;否则,转向Step2。
Step5输出全局最优位置Gbest和所对应minJ,算法运行结束。
3 实验数据和分析
在跟踪精度一定的条件下,光电跟踪系统的跟踪性能主要由两方面决定:(1)跟踪范围的大小。跟踪范围越大,系统的跟踪性能越好。(2)各轴转动角增量的大小。在各轴转动速度相同的条件下,转动角增量越小,实现目标跟踪所需要的时间越短,系统的跟踪快速性越好,系统的跟踪性能也更为优越。
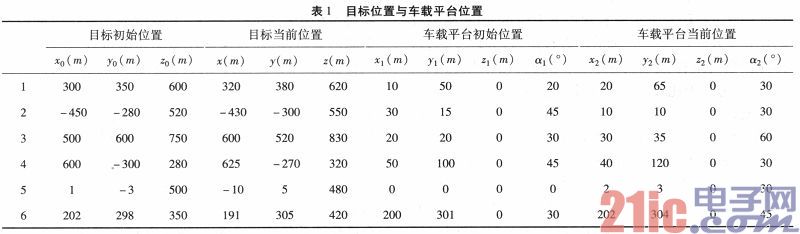
首先,为检验基于混合优化算法的车载三轴跟踪策略优化性能,针对表1中目标位置和车载平台位置,应用混合优化算法对三轴角增量组合进行100次寻优,通过对其寻优迭代次数的多少对算法的快速性进行验证。这里只给出针对表1中第1组所得的寻优迭代次数和平均优化结果。其中,混合优化算法的参数设置如下
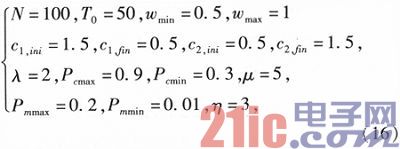
图3(a)为100次寻优的三轴角增量和的平均迭代曲线,图3(b)为100次寻优的不同迭代次数。如图3所示,应用混合优化跟踪策略,通过将三轴角增量寻优问题转化为一维单变量寻优问题,平均只需要

因而寻优过程简便,寻优时间短,算法的快速性良好。
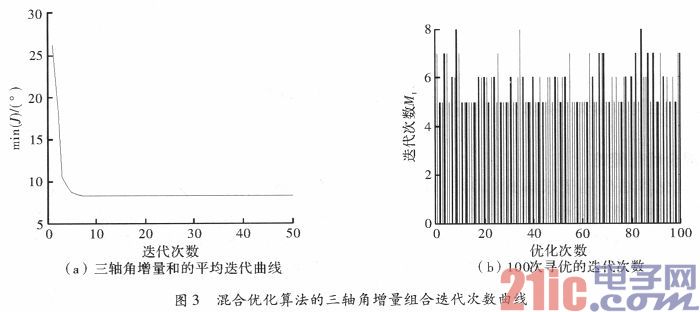
表2给出了基于混合优化的车载三轴跟踪策略跟踪结果和相应的车载两轴策略的跟踪结果。从表2两种跟踪结果的比较中,可得出以下结论:

(1)车载两轴光电跟踪系统在天顶附近(第5和6组数据)的方位角增量明显过大,无法实现目标的跟踪,系统进入跟踪盲区。因而车载两轴光电跟踪系统的跟踪范围最小。
(2)应用混合优化跟踪策略的车载三轴光电跟踪系统,不但在天顶附近能够以较小的转动角增量来实现目标的跟踪,从而避免天顶盲区的产生;而且,与两轴跟踪策略相比较,基于混合优化跟踪策略的车载三轴光电跟踪系统,其转动角增量的最大值|△|max最小,因而可得到更小的角增量组合,系统跟踪过程所需的时间更短,能够更快地实现目标的跟踪定位,跟踪性能最好。
为验证基于混合优化的车载三轴光电跟踪策略的有效性,考虑车载三轴光电跟踪系统的连续跟踪运动。车载三轴光电跟踪系统实验装置如图1所示,由实验装置的相关参数可知,系统各轴的最大转速为v=57.3°/s;目标探测器的采样频率为10 Hz,三轴转角采样频率为50 Hz。为便于比较,考虑当目标过顶时的跟踪轨迹。设在初始时刻光电跟踪系统的瞄准轴正对目标,目标由[3 000,-1 800,600]T经T0=12 s匀速直线运动至[-360,600,1 800]T,车载平台由[100,100,0]T经T0=12 s匀速直线运动至[220,220,0]T,转角由20°匀速转至30°。可看出,当t=10 s时,目标位置为[200,200,1600]T,车载平台位置为[200,200,0]T,此时目标经过车载平台的天顶位置。
为防止寻优过程中偶然出现的迭代次数过大,避免寻优时间过长,根据实际测试的经验将每次寻优的最大迭代次数设定为15;当寻优过程中迭代次数>15时,停止迭代,并选出当前的最优角增量组合作为最终优化结果。
通过分析可知,对于车载两轴光电跟踪系统,当目标到达车载平台天顶位置时(t=10 s),其方位角转动速度为无穷大,其驱动电机的功率无法满足系统跟踪的要求,造成目标丢失,系统进入跟踪盲区。而应用切换策略的车载三轴光电跟踪系统,虽然可以通过方位轴和横倾轴的运动切换避免天顶盲区;但是,切换过程使得系统跟踪过程不连续,不但增加了系统运动控制策略的复杂性,且为保证在运动切换过程中仍可跟踪到目标,在天顶附近需要方位轴转速立刻为0,同时横倾轴立刻由静止达到期望转速。显然,这在实际的系统中是无法实现的,因而不可避免地会增大系统在切换过程中的跟踪误差,降低系统的跟踪精度和可靠性,甚至导致系统在切换过程中丢失目标。
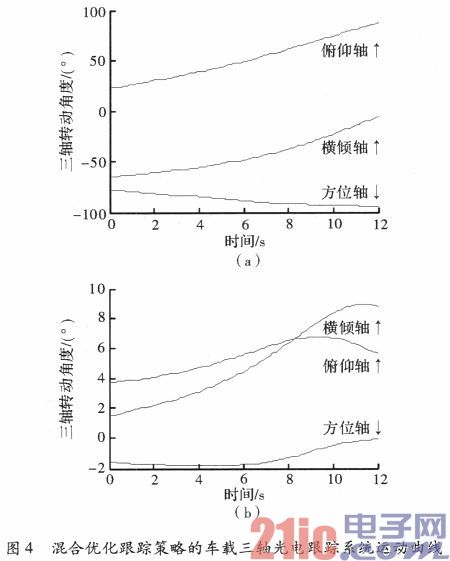
图4为基于混合优化跟踪策略的车载三轴光电跟踪系统的跟踪运动曲线。从图4中可以看出,基于混合优化跟踪策略的车载三轴光电跟踪系统,在整个跟踪运动过程中,系统所需的三轴转动速度均远小于系统给定的最大转速,因而使得三轴能够分别转动一个比较小的角度就可以实现对目标的跟踪定位,保证了系统跟踪过程中的实时性和快速性;而且,系统可以避免跟踪盲区的产生,实现目标的全空间连续跟踪定位,其跟踪性能优于两轴跟踪策略;同时,在跟踪过程中不需要进行轴系间的运动切换,避免了由于切换所引起的跟踪过程不连续,以及切换过程中产生的跟踪误差增大、系统的跟踪精度和可靠性降低等问题,因而其跟踪性能也优于三轴切换跟踪策略。所以系统在整个控制运动过程中的跟踪误差小,跟踪精度高,跟踪稳定性良好,能够满足车载三轴光电跟踪系统对于目标跟踪的要求。因此,基于混合优化跟踪策略的车载三轴光电跟踪系统,能够真正实现三轴联动全空间连续跟踪运动,具有良好的跟踪性能。
4 结束语
本文应用四元数方法分析车载三轴光电跟踪系统的运动学特性,给出三轴转角与目标方位坐标之间的关系。然后,提出一种混合优化算法,并应用于三轴联动全空间连续跟踪策略的研究中,得到在不同目标位置下满足跟踪要求的最优三轴角增量组合。仿真和实验结果表明,应用混合优化跟踪策略的车载三轴光电跟踪系统,能够消除跟踪盲区,实现目标的全空间跟踪运动;而且,系统在跟踪过程中不需要进行轴系间的运动切换,实现了目标的连续跟踪运动,降低了系统运动控制策略的复杂度,避免了由于切换过程所带来的跟踪误差增大和跟踪精度降低问题;同时,在跟踪过程中系统能够以更小的转动轴角增量实现目标的跟踪运动,因而能够在更短的时间内实现目标的跟踪定位。因此,应用混合优化跟踪策略,能够真正实现车载三轴光电跟踪系统的三轴联动全空间连续跟踪运动,而且提高了系统的跟踪性能,其跟踪性能优于现有的两轴和三轴切换跟踪策略,具有良好的工程实用性。


评论