
为什么说现在是智能雷达时代?
据麦姆斯咨询报道,下一代高分辨率智能雷达传感器对于实现L4级和L5级的自动驾驶至关重要。当然,摄像头和激光雷达(LiDAR)在汽车传感器系统中占有重要的地位。在远距离探测、恶劣天气或其它传感器失灵的情况下,雷达是特别有用的!
本文引用地址:http://www.amcfsurvey.com/article/201803/377520.htm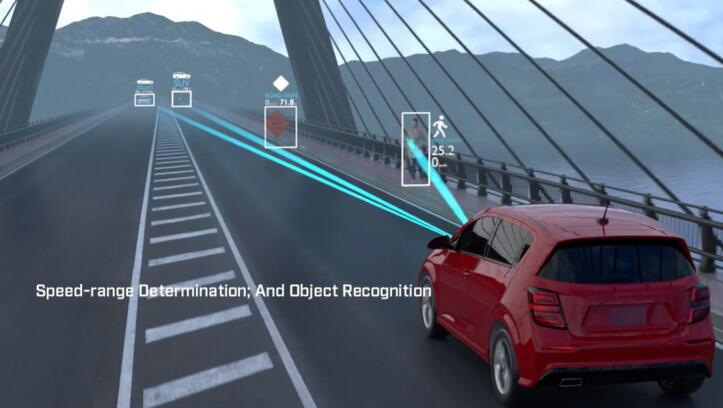
智能雷达的创新正在开始。当前自动驾驶领域要求打造一款全新的成像雷达系统,它既能够像激光雷达一样重建周围环境,又可以像人一样解读周围的世界,并且在全天候运行和探测距离方面完胜激光雷达和摄像头。采用能够形成波束并控制波束的工程超材料结构,可以打造一种全新的雷达架构,并在人工智能(AI)引擎驱动下,实现对物体的发现、识别、跟踪和分类。
上述新一代雷达已经接近交付使用。这种超越数字发射波,使用超材料和人工智能的智能雷达,是实现自动驾驶的关键要素。这种新型雷达平台的创新方案,尚存在的一些障碍,市场还有不少需要培育的地方,以及在下一代自动驾驶中使用智能雷达的前景,就这些问题,我们与麦得威国际(Metawave)的联合创始人兼首席技术官Bernard Casse博士进行了讨论。以下为相关的讨论内容:
问:为什么说现在是雷达时代?
Bernard Casse(以下简称BC):利益相关者意识到自动驾驶发展时间轴取决于决策算法的成熟度和传感器的性能。迄今为止,在改善激光雷达和摄像头方面,特别是在自动驾驶方面,已经作出了巨大的努力,但我们在探测范围和运行速度方面都遇到了性能门槛。然而,其它传感器如雷达,则相对投入较少。因为与摄像头或激光雷达相比,雷达一直处于劣势,它缺乏解析世界的分辨率。但是,汽车制造商现在认识到,雷达是唯一能够在长距离(200米以上)和全天候条件下工作的传感器,它只是缺乏一定的“视觉和智力”。
利用先进的技术,我们可以令雷达“恢复”视觉并嵌入智能。这就是智能雷达时代。大约有十几家初创企业重新审视了汽车雷达的各个方面。我们预计会有更多的初创企业和公司来解决这个问题。

问:作为一家顶级汽车公司的首席执行官,关于雷达您觉得用户需要了解什么?
BC:Elon Musk把大量的重心放在雷达上是正确的。它仍然是汽车中最稳定可靠的传感器。许多人,包括一些汽车制造商,对传统的老式雷达很熟悉。当他们想到雷达时,会认为它是一种“视力”低下的传感器,只能模糊“看到”整块的金属(打个比方,这里有一大块金属,那里有一小块金属)。对传统雷达而言,情况的确是这样,但下一代智能雷达就完全不同了。
点云成像(类似于激光雷达)可以通过光束扫描光栅和按照一定算法,实现对物体的图像描绘,比如辨别路标、车辆类型、人、灯柱和更多物体。随着视觉增强和速度的提高,我们可以在雷达中嵌入智能。也就是说,让现在的雷达拥有一个增强的“数字眼”,它可以学习识别物体的特定特征,并将它们与相应的类别相关联。
问:请您多谈谈人工智能的重要性?
BC:人工智能(AI)很关键,因为它是我们人类分散式智能背后的驱动力。我们是分散式智能的支持者。我们认为,雷达传感器和任何其它传感器都应该有自己的大脑。车辆中的决策算法应该依赖于传感器融合(中央智能)和单个传感器(分散式智能)。
这给汽车增加了另一层安全性。如果你的汽车使用摄像头和/或激光雷达“看”到一座桥,现在你的雷达也可以说:“当然,我也能看到一座桥。”分散式智能的概念对雷达来说更为重要,因为它是目前唯一能看到前方300米的传感器,以便成为最早提供预警的系统。当自动驾驶车辆有来自不同传感器的多组数据,使汽车能够接收信息并感知周围环境,自动驾驶会更加安全。
问:当前雷达的发展状况是怎样的?特别是在自动驾驶方面。
BC:当今最先进的雷达是100%数字波束形成(DBF)。尽管在性能方面模拟雷达仍然表现卓越,但因为它的高成本、高功耗架构和复杂性,汽车工业抛弃了模拟雷达(如相控阵天线)。汽车工业对成本一直非常敏感,而且信号处理的成本最终会不断下降,就像其它微芯片上的计算(摩尔定律)一样,DBF仍然是一个诱人的选择。
但DBF的分辨率和速度仍然有限。军方更注重性能,对弹道导弹的探测和跟踪仍然使用模拟雷达。对自动驾驶而言,成本不是也不应该是头等大事,性能和安全性才是最重要的!
问:数字雷达的局限性是什么?
BC:DBF有三个主要缺点,它们有点相互关联:
1、它很慢。DBF用于扫描场景的时间需要毫秒级的等待。在数字域中的信号处理是非常重要的。要达到可接受的信噪比(SINR),需要有毫秒级的积分时间。处理一系列复杂的模拟数字电路和为运行DBF而进行的数字权重的分配,都会造成更高的运算工作量,导致运行迟缓。
2、DBF缺乏分辨率——它看不到狭窄的物体或行人。它不是一个“真正”的波束形成架构,而且完全的波束成形是不切实际的。因为它需要大量的天线来实现高分辨率。首先,实现许多天线是非常昂贵的,需要在雷达芯片组上安装多个端口(非传统)。此外,这将需要更多的快拍数量以获得一个可接受的SINR(因为全方位的噪音将让系统超负荷)。凭借传统的三个发送端口和四个接收端口,分辨率不够清晰,无法看到行人。它适用于汽车(可在分辨率、SINR和范围之间良好权衡),但不适合非金属物体。
3、产生重影。DBF对高相关信号敏感,即DBF会增强来自多条路径信号产生的噪声,产生重影。


评论