
多种手势控制技术在汽车电子中的应用
手势控制在我们的日常生活中应用的越来越广泛,比如说手势控制电脑,手势控制电视,还有更加智能的是利用手势控制摄像头来隔空玩游戏。手势控制让我们的生活越来越精彩,在某些方面也让我们的操作越来越简便。
本文引用地址:http://www.amcfsurvey.com/article/201710/368137.htm
1. 手势控制在汽车上的应用
在汽车上,手势控制也有很大的用处,其最大的优势就是可以简化操作,让车主可以更加快捷的实现各种操作。想象平时驾驶时需要用到的操作吧,左手转向灯、右手雨刷器、双手同时把握方向盘,对于手动挡车型而言,左脚离合右脚刹车和油门,右手还要操纵换挡杆。这还不算诸如调节车窗、后视镜、座椅,以及对付按钮众多的中控台(即使是触屏时代,虚拟按钮也依然存在)。
CES展上,大众展出的高尔夫R Touch概念车非常酷炫。在车外对着后视镜摆摆手就自动展开;坐进车里,抬起手在头顶旁边扫一下,天窗自动打开;手对着中控台往上划一下,音量就变大……。也许这些夸张了点,但是最基本的手势控制可以实现包括地点导航、调整车内温度、调整车载音乐音量、选择歌曲、调整座椅位置及改变巡航控制系统的速度等。
2. 手势识别的类型
手势控制的核心是手势识别技术,就目前的技术而言,大都的手势识别采用的是计算机视觉技术。手势识别由简单粗略的到复杂精细的,大致可以分为三个等级:二维手型识别、二维手势识别、三维手势识别。
前两种手势识别技术,完全是基于二维层面的,而第三种手势识别技术,是基于三维层面的。三维手势识别与二维手势识别的最根本区别就在于,三维手势识别需要的输入是包含有深度的信息,这就使得三维手势识别在硬件和软件两方面都比二维手势识别要复杂得多。当然三维识别也能够识别更多的动作。
三维识别的硬件实现一般包括三种方式:光飞时间、结构光、多角成像。下面就来看看这些技术的原理和在汽车上的应用。
3. 光飞时间手势识别
光飞时间(Time of Flight)的基本原理是加载一个发光元件,发光元件发出的光子在碰到物体表面后会反射回来。使用一个特别的CMOS传感器来捕捉这些由发光元件发出、又从物体表面反射回来的光子,就能得到光子的飞行时间。根据光子飞行时间进而可以推算出光子飞行的距离,也就得到了物体的深度信息。
由于光的传播速度非常快,基于ToF技术的感光芯片需要飞秒级的快门来测量光飞行时间。这也是ToF技术难以普及的原因之一,这样的感光芯片成本过高。
德尔福利用光飞时间原理,开发了自己的手势识别系统,其结构原理及操作如下:
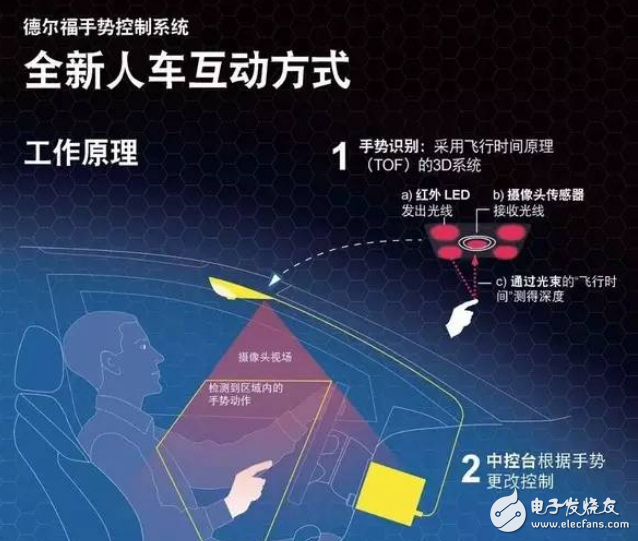
当然还有一种方式是将光脉冲改为无线电波,极高频毫米波无线电波也同样可以用来捕捉动作、距离、速度等信息,感应误差精细到毫米。然而,如何把具有如此精度的设备微小化是一件十分苦难的事情,最难的地方在于微小化会影响器件的发射功率和效率、感应灵敏度等。
4. 结构光手势识别
结构光技术基本原理与ToF技术类似,所不同之处在于其采用的是具有点、线或者面等模式图案的光。
这种技术的基本原理是:首先激光发射器将结构光投射至前方的人体表面,再使用红外传感器接收人体反射的结构光图案。然后,处理芯片根据接收图案在摄像机上的位置和形变程度来计算物体人体的空间信息。当物体距离激光投射器比较近的时候,折射而产生的位移就较小;当物体距离较远时,折射而产生的位移也就会相应的变大。结合三角测距原理,再进行深度计算,即可进行三维物体的识别,进而复原整个三维空间。
5. 多角成像手势识别
多角成像技术与立体成像技术相同,这种技术的基本原理是使用两个或者两个以上的摄像头同时摄取图像,就好像是人类用双眼、昆虫用多目复眼来观察世界,通过比对这些不同摄像头在同一时刻获得的图像的差别,使用算法来计算深度信息,从而多角三维成像。
多角成像不需要任何额外的特殊设备,完全依赖于计算机视觉算法来匹配两张图片里的相同目标。
6. 三种手势识别对比
多角成像是三维手势识别技术中硬件要求最低,但同时软件复杂度又是最高的。相比于结构光或者光飞时间这两种技术成本高、功耗大的缺点,多角成像能提供“价廉物美”的三维手势识别效果。







评论