
UHF RFID读写器的设计方案
为了分析UHF RFID读写器系统抗干扰性能,本文提出了基于ISO18000-6 type B 协议下UHF RFID读写器的设计方案,并对其通信过程进行了Simulink仿真,给出了曼彻斯特编解码以及2ASK调制解调的模型。
本文引用地址:http://www.amcfsurvey.com/article/201710/367222.htm最后,结合实际中经常遇到的高斯白噪声信道分析了系统的信道抗干扰性能,给出了系统的误码率随信噪比变化曲线。仿真表明本方案所设计的UHF RFID读写器系统具有较高的抗干扰性能。
0 引言
射频识别系统是一种非接触的自动识别系统,通过射频无线信号自动识别目标对象,并进行读、写数据等相关操作,这种无线获取数据的方式在工业自动化、商业自动化、交通运输控制管理众多领域得到广泛应用。
RFID系统由阅读器、电子标签和计算机网络构成,其中读写器是RFID系统信息控制和处理中心,在系统工作中起着举足轻重的作用,其性能的好坏直接影响到数据获取的可靠性和有效性。而超高频读写器在远距离识别以及高速数据读取方面有着显着的优势,为此本文研究基于ISO 18000-6标准的Type B协议下的高频读写器具有重要的现实意义。
1 RFID工作原理
不同的RFID系统,工作原理略有不同,但其依据的基本工作原理是一样的。RFID系统读写器与电子标签基本结构如图1所示。由读写器模块中振荡器产生射频振荡信号,经过载波形成电路产生载波信号,再经过发送通道编码、调制和功率放大后经天线发出射频信号,当电子标签进入到工作区域,读取读写器发送的信号,一部分用于产生能量驱动电源激活自身工作,一部分用于获取信息,并根据指令将带有自身信息的信号经过编码、调制后由天线发送给读写器。读写器再将读取的信号传送给数据处理模块进行相应操作。
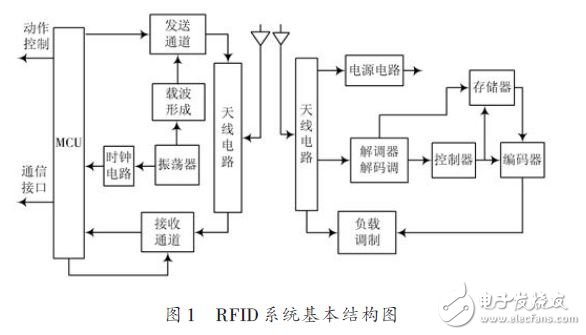
读写器在RFID 系统中扮演重要的角色,主要负责与电子标签的双向通信,同时接收来自主机系统的控制指令。各种读写器虽然在耦合方式、通信流程、数据传输方法,特别是在频率范围等方面有着根本的差别,但是在功能原理上,以及由此决定的构造设计上,各种读写器是十分类似的。在ISO18000-6 Type B 协议下RFID 系统是基于读写器先发言原理工作,即读写器先发送出一定频率的射频信号,当电子标签进入到该工作区域时,首先产生感应电流对自身激活,进而发射出带有自身信息的信号,读写器读取该信号后送到信息处理中心并进行相应的处理。
2 UHF RFID读写器设计
超高频射频识别系统采用的频率主要位于ISM 频段,基于ISO 18000-6标准的射频识别系统的频率主要位于860~930 MHz,常用频率为915 MHz.在该频段下,电子标签的识别距离一般能达到1~10 m,而电子标签的识别距离取决于读写器的输出功率,识别距离越远,其被识别的准确率越高,但同时读写器输出功率越高,其造价及技术难度将越高,实际应用中,一般根据系统要求来确定实施方案。
2.1 读写器的编解码模型设立
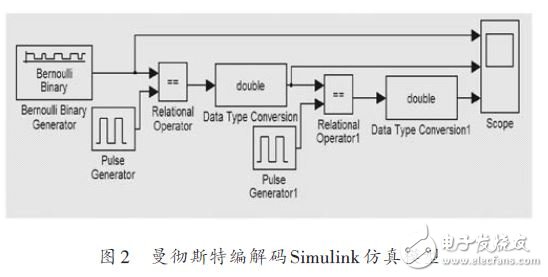
在RFID 中,为了使读写器在读取数据时能很好地解决同步的问题,往往不直接使用数据的NRZ 码对射频进行调制,而是将数据的NRZ 码进行编码变换后再对射频信号进行调制。在ISO18000-6 TypeB协议下,使用的是曼彻斯特编码。其编码原则是,当原始数据为“1”,将其编码为“10”;当原始数据为“0”,将其编码为“01”。这种编码的特点是每个码元中间都有跳变,低频能量较少,便于接收端提取时钟信息。
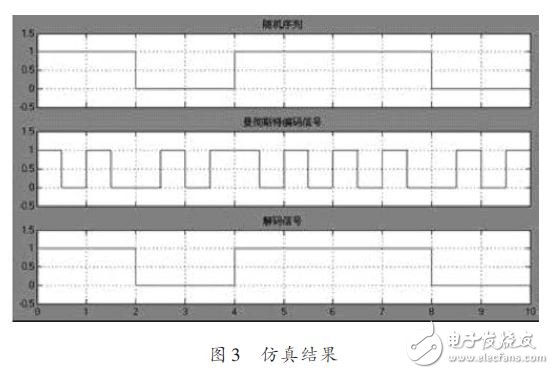
仿真实现时,用一个频率为原始数据发送频率2倍的矩形波与原始数据做异或运算即可实现曼彻斯特编码。对曼彻斯特编码进行解码的目的是从接收到的曼彻斯特码流中恢复出原始信号,仿真实现时可以使用和编码相反的方法,即用一个频率为原始码流一半的矩形波与原始数据做异或运算即可实现曼彻斯特解码,其仿真模型如图2所示,仿真结果如图3所示。曼彻斯特编解码后的输出信号与原始信号保持一致,符合要求。
2.2 读写器的调制解调建模
按照从读写器到电子标签的传输方向,读写器中发送的信号首先需要经过编码,然后通过调制器调制,最后传送到传输通道上去,基带数字信号往往具有丰富的低频分量,因此必须用数字基带信号对载波进行调制,以使信号与信道的特性相匹配。2ASK 调制是基于ISO18000-6标准下RFID 系统最常用的调制方式,其原理利用载波的幅度变化来传递数字信息,而其频率和初始相位保持不变。
2ASK信号可以表示成具有一定波形的二进制序列与正弦波的乘积,即:

式中:A 为振幅;Ts 为码元持续时间;g(t)为持续时间为Ts 的基带脉冲波形,为简便起见,通常假设g(t)是高度为1、宽度等于Ts 的矩形脉冲。
解调和调制的实质一样,均是频谱搬移。调制是把基带信号搬移到载波位置,这一过程可以通过一个相乘器来实现。解调则是调制的反过程,即把在载频位置的已调信号的频谱搬回到原始基带位置,因此同样可以用相乘器与载波相乘来实现。
在ISO18000-6 Type B协议下,RFID系统采用的是2ASK调制。以下仿真模型给出了读写器向电子标签传输过程中编码及调制解调的仿真模型,前面已经对曼彻斯特编码给出了介绍,此处不再赘述。将经过编码信号与正弦波进行相乘并通过带通滤波器后,可得到已调的高频信号,解调时将已调信号与原正弦信号相乘再经过低通滤波以及抽样判决器,即可恢复出原始的编码信号,在对接收到的已调信号进行解调时采用相同频率的正弦波,其曼彻斯特编码进行2ASK调制解调的仿真模型如图4所示,仿真结果如图5所示。
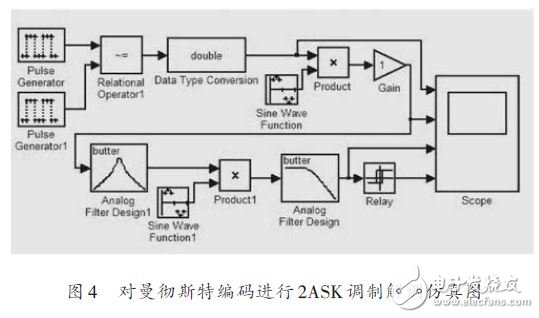

在本文中为了加快系统的仿真时间,将本地振荡正弦波幅值设置为1,频率设为915 Hz,设置脉冲发生器的采样时间分别为0.1 s和0.05 s,带通滤波器参数设置为600~1 100 Hz,低通滤波器的截止频率为200 Hz,抽样判决器的时间设为0.01 s.从图5 中可以清楚的看到,信号经过调制以及解调之后恢复的信号与原始信号保持一致。
2.3 UHF RFID读写器传输性能的研究
任何信号的传输都伴随着噪声,加性高斯白噪声是最常见的一种噪声,它存在于各种传输煤质中,表现为信号围绕平均值的一种随机波动过程。加性高斯白噪声的均值为0,方差表现为噪声的功率的大小。本文对读写器与电子标签之间的信号传输性能的研究就是基于加性高斯白噪声信道的基础之上。
图6给出UHF RFID读写器向电子标签传输方向的通信模块仿真,仿真结果如图7所示。已调信号经过一个加性高斯白噪声信道传输后再经带通滤波器滤除多余的谐波后与正弦载波信号相乘进行解调,解调后的信号经过放大再滤波以及抽样判决就可以得到原始的基波信号。
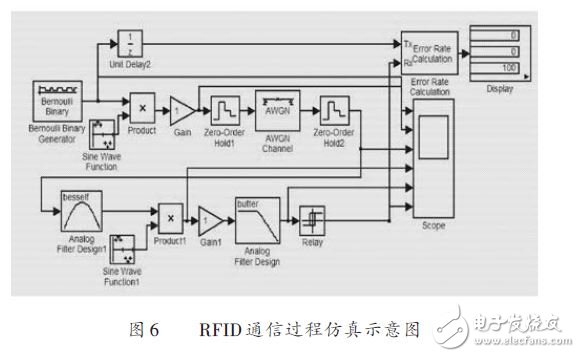

在图7 中将编码信号与抽样判决后的信号通过关系比较器进行比较,当两者的结果不一致时,输出1,当两者结果一致时输出0,再将结果与1一起输入错误率统计模块,即可得到误码率,考虑到信号传输过程中的延迟,故在原始信号后加一延迟模块,延迟时间可由仿真图形中进行估计。
2.4 误码率特性分析
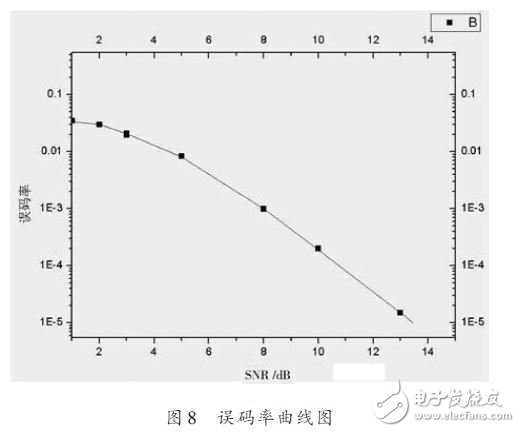
本文所建立的UHF RFID 读写器仿真模型是建立在ISO18000 Type B 协议的基础上的,其常用频率为915 MHz,将载波信号频率设为915 MHz.为了降低系统的仿真时间,将每个信号的抽样数设为2,若增加信号的抽样数时,所得的误码率将降低,但同时仿真时间将增大,取抽样信号的功率为1 W,观察信噪比从1~15 dB变化时,系统的误码率的变化,误码率曲线如图8 所示,从图中可以看出,当信噪比达到12 dB时,误码率已达到10-4,系统具有较高的抗干扰性能。
3 结语
本文提出了基于ISO18000-6 type B 协议下UHF RFID读写器的设计方案,并对其通信过程进行了Simulink仿真,给出了曼彻斯特编解码以及2ASK调制解调的模型。通过结合实际中经常遇到的高斯白噪声信道分析了系统的信道抗干扰性能,给出了在915 MHz频率下,系统的误码率曲线,分析了系统的抗干扰性能,在SNR 达到12 dB,误码率达到10-4 ,系统具有较高的抗干扰性能。(作者:张媛,芦海玉,朱武)


评论