
基于差动式电容传感器的车辆载荷检测系统的实现
0 引言
本文引用地址:http://www.amcfsurvey.com/article/201706/350688.htm随着公路运输业和商业贸易的不断发展,车辆载荷检测技术已成为测量领域研究的重点。目前比较常用的车辆动态载荷检测传感器主要有弯板、压电轴、单传感器、车载电容传感器及光纤传感器。这些载荷检测传感器多适用于固定式安装,对路面情况要求较高,即使一些便携式车辆载荷检测传感器也因为重量过重、体积过大的缺点无法真正实现便携测量。同时,一些传感器测量技术过于复杂,传感器价格过于昂贵。因此,为了减小安装和维护成本,提高车辆动态载荷检测系统的便携性,本文提出了一种电容式车辆载荷检测系统,该系统中载荷检测传感器采用差动式结构,大大提高了测量的灵敏度和非线性,电容测量线路采用差动脉冲宽度调制集成测量电路,数据的采集和处理采用自带A/D转换器的STC89LE516AD单片机芯片,数据通信采用无线通信模式。这种载荷检测系统结构简单,成本低廉,安装方便,差动式电容载荷传感器抗干扰能力强、动态响应好、测量范围宽、灵敏度高、稳定性能好。
1 差动式电容车辆载荷检测系统
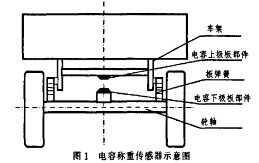
差动式电容车辆载荷检测系统如图1所示。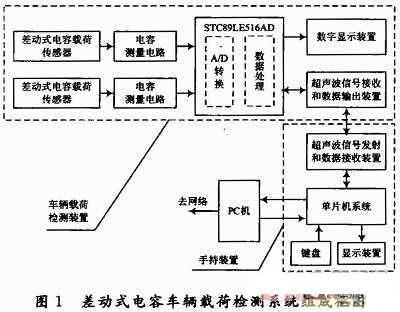
车辆载荷检测装置为便携式,使用时铺设在路面上。手持装置为测量系统控制单元,通过无线通信方式对检测装置发出指令和接收数据。载荷检测传感器采用差动式电容载荷传感器,传感器将载荷的变化转变为电容值的变化。电容测量电路采用独特的差动脉冲宽度调制集成电路,将来自于差动式电容载荷传感器的极其微弱的电容信号采集出来,并转化成易于检测的电压信号。数据处理模块采用内部自带8路8位A/D转换器的电压输入型STC89LE516AD单片机芯片。数据处理模块对信号进行A/D转换、数据采集、数据处理,之后,将处理后的载荷结果输出。为了减少线路铺设的麻烦,增加工作人员的安全性,检测系统的数据通信采用无线通信装置。
2 差动式电容载荷传感器结构及工作原理
差动式电容载荷传感器结构示意图如图2所示。它主要由测量头、外壳、敏感元件(弹性体)、定极柱、动极柱、电极、等位环、引出线等构成。其特点为:测量范围宽;灵敏度高,便于拾取信号;极板间不接触、不变形、不磨损,机械损失小、寿命长;电容传感器受温度影响小;动态性能好;结构简单、适应各种恶劣环境和场合。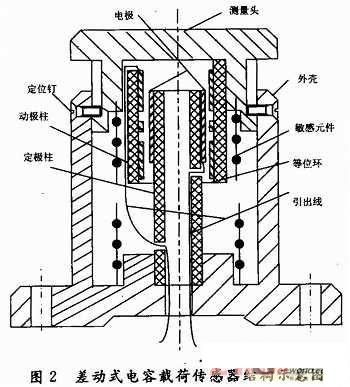
传感器的测量头和壳体为间隙配合,两者之间可相对滑动,并有定位螺钉定位测量头的初始位置,定位螺钉同时也起到测量头滑动时的定向作用,还可使施力物体保持相对稳定。测量头由敏感元件(弹性体)支撑,它受外力作用后把该力传给敏感元件。敏感元件(弹性体)位于测量头和壳体之间,起感受外力并按一定关系转化为机械位移量的作用。动、定极柱为中空圆柱型,其表面镀有电极。动极柱与测量头粘接为一体,随测量头一起滑动。定极柱与壳体粘接为一体,相对固定不动。在动、定极柱电极的两端均设有等位环,以减小电容边缘效应,提高测量精度。
当差动式电容载荷传感器受外力F作用时,测量头把该力传给敏感元件,敏感元件是弹性系数为k的弹性体,在该力作用下发生弹性变形,其变形量d与作用的外力成正比。敏感元件的变形使得测量头以及动极柱上的电极移动同样的距离d。此时,差动电容载荷传感器的电容值将产生相应的变化,其变化量为△c,测量头移动的距离d与传感器输出电容的变化量△c成正比。由此可知,被测物体所受外力F与差动式电容载荷传感器的输出电容变化量△c成正比,即:(式中,k为敏感元件的弹性系数;L为动极柱与定极柱初始覆盖部分长度;c0为单个电容电极间的初始电容)。只要由测量电路检测出电容的变化量△c,就可知物体所受的外力F。
3 电容测量电路
差动式电容载荷传感器是将被测载荷的变化转换为电容量的变化输出,而电容传感器所产生的电容量很微小,电容极板引线与地之间产生的杂散电容往往大于被测电容。因此小电容转换测量技术一直被人们所重视。然而,一般的检测电路结构比较复杂,精确度较低,不能满足测量要求。为了提高测量的灵敏度,针对差动式电容载荷传感器,在基于四相检测技术的电荷转移式电容检测电路的基础上,设计采用了差动脉冲宽度调制集成测量电路,该电路具有集成度高、实现了电容传感器头有源化、输出脉冲方波、省去高频激励信号源、功耗低、抗干扰能力强、分辨率高等特点,尤其适合差动式电容传感器的测量。其内部结构框图如图3所示,图中的虚线框内为差动式电容传感器的两个可变电容C1和C2。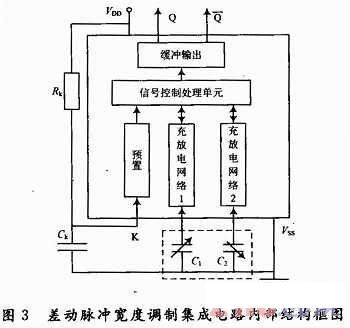
工作原理如下:设直流电源接通时,Q端为高电平,端为低电平,则信号控制单元使充放电网络1向电容C1充电,C1上电压渐升,一旦达到电路控制电平值,信号处理单元使Q端立即变为低电平,而端为高电平;此时,电容C1上的电压经充放电网络1迅速放电至零,同时信号控制单元使充放电网络2向电容C2充电,C2上电压渐升,一旦达到电路控制电平值,信号处理单元再次使Q端为高电平,端为低电平;于是又开始下一周期的C1充电C2放电,……,如此周而复始,在差动脉冲宽度调制集成电路的输出端各产生一串其宽度受C1和C2电容变化量控制的矩形方波。当C1=C2时,Q和端电压波形反相对称,从Q端与端取出的两个平均值电压之差将等于零。当被检测的载荷使电容C1>C2时,两输出端的电压平均值之差为:(其中V1为充电网络输入的电压值),可获得较好的线性度。
4 数据采集与处理
数据的采集与处理单元采用自带A/D转换器的STC89LE516AD单片机芯片,完成数据采集、模数转换、数据处理以及驱动显示单元。当时钟在40 MHz以下时,每17个机器周期可完成一次A/D转换。STC89LE516AD单片机与差动脉冲宽度调制集成电路结合起来,完成电容传感器的检测。其主程序和A/D转换程序流程图如图4,图5所示。
5 数据通信
数据的传输采用无线通信模块。利用nRF401无线收发芯片和控制单片机89C52实现差动式电容车辆载荷检测系统中的无线通信,具有硬件电路简单、成本低廉、编程简便、通信可靠性高等优点。无线通信技术在车辆载荷检测系统中的应用,使执法人员可以方便地通过手持仪器对公路车辆进行不停车载荷检测,大大提高了工作效率。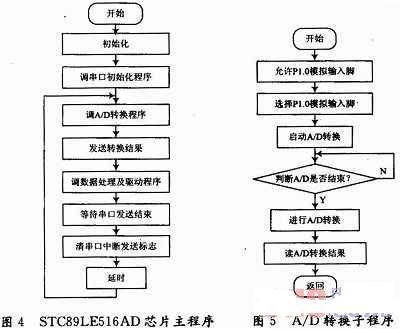
无线通信装置包括载荷检测装置和手持装置两部分。载荷检测装置接收手持装置的指令,向手持装置输送载荷结果,必要时向手持装置输送车辆类型、车牌号数据,进行误差校正;手持装置中超声波信号发射和数据接收装置向载荷检测装置发出指令,接收来自载荷检测装置的数据;单片机系统接收数据后送给显示装置,并可以与PC机建立数据联系;PC机形成局域网后,可以完成信息收集、显示、查询、检索以及数据分析统计、处理、存储等多项工作。
从图1中可以看出,载荷检测装置对车辆的载荷进行检测和处理,从单片机按照控制命令接收车辆的载荷检测装置的数据,与主机进行数据通信。图6为从单片机构成的显示及收发控制系统的硬件组成框图,主要包括采集与数据处理模块、看门狗、复位电路、电源监控电路、实时时钟电路、无线收发模块、控制单片机、信息输出单元等部分。控制单片机选用Atmel公司的89C52。
图1中的手持仪器为主机,主机的硬件结构框图如图7所示,由控制单片机、显示电路、看门狗、复位电路、电源监控电路、实时时钟电路、按键、无线收发模块,以及串行通信电路组成。
当道路管理人员按动手持仪器的控制按键,要求读取数据,主机接到命令后,向从机发送命令,通过无线收发模块接收从机载荷数据,然后在手持仪器的显示屏幕上显示载荷信息和车辆有关信息,并且可以根据需要通过串口通信上传至道路管理部门的计算机。与从机相比,主机多了一个用来与计算机通信的串行口。此串口采用RS 232标准,可用MAX232芯片实现。
6 结论
基于差动式电容传感器的车辆载荷检测系统,具有机械结构简单、性能可靠、测量电路简单、抗干扰性好、体积小、性价比高等特点。实际的试验测试结果表明,该车辆载荷检测系统对车辆进行动态载荷检测,车辆总载荷的测量误差在10%以内,其精度优于ASTME131-02给出的I类WIM(Weigh-in-Motion)系统精度(置信95%时总重误差±10%),可用于交通数据采集,尤其适合公路稽查人员进行便携式测量,具有良好的使用前景。






评论