
SAM4E单片机之旅——8、UART初步
通信还是比让LED灯闪烁实用得多的。
本文引用地址:http://www.amcfsurvey.com/article/201702/344015.htm这次试试使用UART,实现开发版和PC间的通信。功能比较简单,就是把PC发向开发版的内容发送回去。这次主要介绍一下UART的配置,至于通信,则使用较为简单的不断查询UART状态寄存器的循环实现。
一、 准备工作
UART作为异步串口通信协议的一种,所以必须先要准备一根串口线。用串口线将PC的串口和开发板的DBGU口连起来。
同时,在PC上需要准备好串口通信软件。
二、 电路
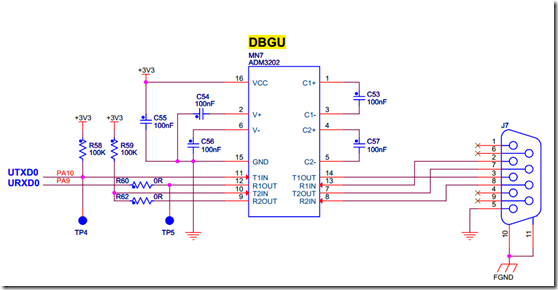
DBGU有两个引脚分别与PA10和PA9相连,这两个复用引脚的外设A即为UART0。
三、 PIO配置
需将PA9和PA10引脚两个引脚复用为外设A引脚。
四、 UART测试
为测试线缆的连接、串口通信软件是否正确,可以先使用UART的测试模式。在使用“自动回应模式”或者“远程回环模式”时,接收引脚均会和发送引脚相连,即发送端会接收到发送的数据。
以下为在UART_MR中选择“远程回环模式”时的代码:
1UART0->UART_MR = UART_MR_CHMODE_REMOTE_LOOPBACK;
若PIO配置、线缆连接、PC端软件均无问题,则现在在PC端即可接收到原本发送的数据了。测试成功后注意删除相关的测试代码。
五、 UART配置
PMC时启用UART时钟
1PMC->PMC_PCER0 = (1 << ID_UART0);
波特率设置
波特率的计算方法为:MCK / ( CD * 16 ),其中CD在UART_BRGR中设置。
因为CD必须为整数,所以能使用的波特率的值就较为有限了。同时,我所使用的串口通信软件只支持选择常用的波特率。而在通信过程中,对双方波特率的误差有一定的限制(如芯片手册中提到,不推荐USART在波特率误差超过5%时使用)。所以这更减少了波特率的选择范围。
在使用默认MCK,即4 MHz的情况下,我选择使用一个较为慢速的波特率:19200 Hz。将CD的值设为13,使实际波特率为19230 Hz左右,即误差大概为0.1%。
UART0->UART_BRGR = UART_BRGR_CD( 13 );
UART控制
需要在UART控制寄存器(UART_CR)中使能接收器及发送器:
UART0->UART_CR = UART_CR_RXEN | UART_CR_TXEN;
UART数据包格式
本芯片的UART支持的格式仅有:8位数据位、发送时停止位为1位。但我们可以设置校验位,不过为了简单起见,这里不使用校验:
1UART0->UART_MR = UART_MR_PAR_NO;
六、 数据收发
通过不断查询状态寄存器的相关字段,以了解收发的状态,然后进行操作即可:
while(1)
{
/* 接收*/
while ((UART0->UART_SR & UART_SR_RXRDY) == 0)
;
data = UART0->UART_RHR;
/* 发送*/
while((UART0->UART_SR & UART_SR_TXRDY) == 0)
;
UART0->UART_THR = data;
}
七、 PC端配置
将PC端的串口通信格式设置如下:波特率 19200;数据位 8;停止位 1;校验 无。设置完成后即可通信。











评论