
基于STC单片机智能探测机器车的设计
摘要:介绍一种智能探测机器车,该车由智能探测系统和数据接收系统两部分组成。探测系统分为核心板和任务板,核心板采用STC单片机 IAP15F2K61S2为控制单元,完成循迹、定位、码盘测速、360度转身,采用蓝牙模块实现与接收系统无线通信;任务板由温度和湿度传感器、超声波传感器、颜色传感器构成,完成测距、温度检测、湿度检测和颜色识别。接收系统同样以IAP15F2K61S2为核心,由蓝牙模块、12864液晶显示模块、语音播报部分组成,完成无线数据的接收、数据的实时显示、同步语音播报的功能。
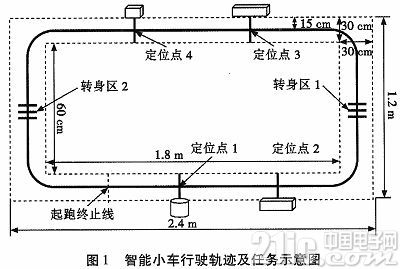
本文引用地址:http://www.amcfsurvey.com/article/201610/307276.htm本文来源于全国大学生电子设计竞赛,任务要求制作一台智能探测机器车,能实现在特定轨道上行驶一周,在设定的任务点精准停车,完成超声波测距,温湿度测量,颜色识别,360°转身等任务,同时要求将测得的数据通过无线通信的方式传输到另外一台设备上,进行实时显示。在原有任务的基础上新增转向灯,模拟真实汽车行走状态,左转时左前和左后转向灯亮,右转时右前和右后转向灯亮,遇到黑线时灯全亮。每次任务完成会有蜂鸣器提示,同时在液晶显示系统有任务完成的语音提示。
1 系统设计
1.1 硬件设计
本系统主要有两大部分构成:智能探测系统和数据接收系统。主控芯片是智能小车智能探测系统和接收系统的核心,小车的控制、探测、数据发送、接收都是通过主控芯片连接外围电路实现智能探测车的各系统功能。采用的是宏晶科技生产的国产单片机IAP15F2K61S2,此款芯片具有高速、高可靠、低功耗、超强干扰等优点,能够完全支持智能探测车实现任务要求的所有功能。
1.2 系统框图
系统总体框图由智能探测系统和接收系统两部分构成。
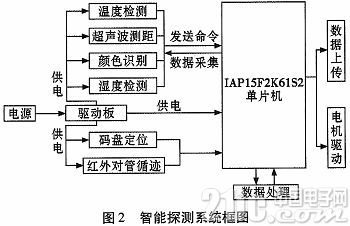
1.2.1 智能探测系统
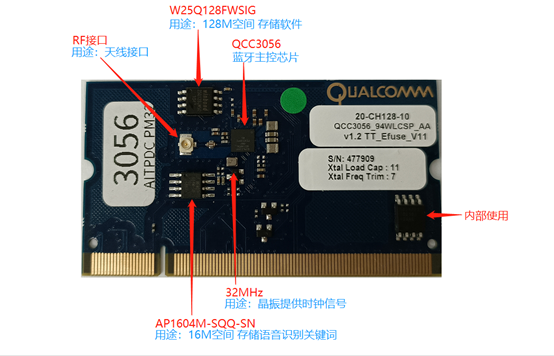
智能探测系统由核心板和任务版两部分组成。核心板主要部分是IAP15F2K61S2芯片、电压转换模块、蓝牙发送模块以及外设和驱动电路。任务板主要包括波模块、颜色识别、温湿度模块等电路,如图2所示。
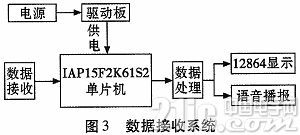
1.2.2 接收系统
接收系统主要由IAP15F2K61S2芯片,语音模块、LCD12864显示模块,蓝牙接收模块组成,如图3所示。
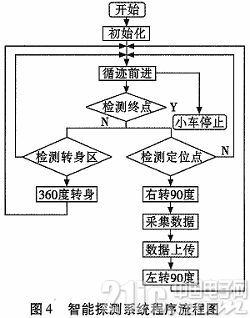
1.3 软件设计
程序设计同样分为智能探测系统和数据接收系统两个部分。智能探测系统设计流程图如图4所示。数据接收系统流程图略。
2 理论分析与计算
2.1 循迹电路分析
循迹电路采用8路红外对管进行循迹线、定位点、转身区、起点终点线进行循,循迹灯顺序从左到右是0到7八个红外对管,红外对管照在黑线输出高电平,遇到全黑(2 cm)时全灭;照到白色部分输出低电平,遇到全白部分时全亮。
当红外对管4、5遇到黑线时,全速前进,当循迹是其他对管,都要进行不同程度的微调(向左或向右),越靠近两边,调的幅度越大。小车电机的驱动芯片是 L298N,该芯片内部是H桥电路,可以控制电机的正反转。小车驱动板的PWM驱动是实现小车转向的必要条件,通过PWM控制小车的速度,从而实现转向。
2.2 精确定位和360度转身模块分析与计算
小车精确定位中,需要实现90°、360°转身,小车是通过光电码盘实现小车的精确定位和转身。根据小车旋转一周码盘计数值与实际测量相结合进行调节实现360°精确转身。
2.3 温度、湿度检测模块分析
任务中要完成定点1的温度检测和定点4的湿度检测,这里使用的是DHT11温湿度传感器。此模块的传感器有VCC、DATA、NC、 GND四个管脚,NC是悬空状态,这里将NC和VCC连接在一起,DHT和核心板上的P1.3连接,GND引脚接地。主要实现对温度、湿度的检测,然后将检测到的信号转换成数字信号。然后送到单片机进行分析处理,从而得到定位点1的温度值和定位点4的湿度值。
2.4 超声波检测模块分析
定位点2要完成超声波对距离进行检测,我们利用ICL7555振荡产生一个40 kHz的方波信号发射,然后通过CX20106芯片处理信号接收。当CX20106芯片1管脚超声波信号输入端接收到40 kHz的信号时,会在第7管脚遥控命令输出端产生一个低电平下降脉冲,这个信号可以接到单片机的外部中断引脚作为中断信号输入,用于计算时间差。通过单片机来计算发射信号到收到信号时产生下降沿的这段时间的长度,再通过数学计算,转化为距离,显示在液晶显示器上。
3 测试数据及分析
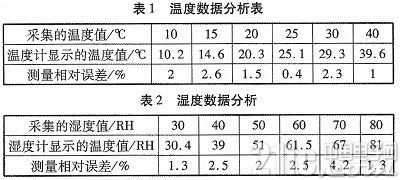
3.1 温度、湿度数据采集
测试条件是:在定位点1一侧,放置圆柱形容器直径6 cm,高度25 cm,内装液体水,用于调节环境温度,对温度进行采集,测试结果与温度计比较如表1所示。在定位点4一侧,放置一个加湿器,加湿器可前后移动10 cm~30 cm,用于调节环境湿度,并对温度进行采集,测试结果和湿度计比较如表2所示。
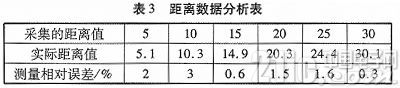
3.2 超声波测距数据采集
测试条件:在定位点2处放置长方体尺寸长度20 cm,高度25 cm,2 cm左右,长方体可前后移动10 cm~20 cm,测试结果与卷尺测量结果比较结果如表3所示。
4 小结
通过多次的模块单独调试和整体软硬件结合调试,不断地对系统、程序进行优化,小车能比较流畅的沿着黑线循迹,完成4个定位点的精确定位,并在转身区内完成 360°转身;完成温湿度、超声波、颜色等数据采集及显示,并通过蓝牙串口通信实现了数据无线发送,上位机无线接收数据,能够进行数据显示和语音播报。







评论