
基于MEMS医疗运动检测系统解决方案
基于MEMS的系统可以显着提高髋关节和膝关节植入体与病人骨骼结构的对准精度,减轻不舒适感,从而避免进行修正手术。
本文引用地址:http://www.amcfsurvey.com/article/199520.htm本文将研究医疗导航应用的独特挑战,并且探讨可能的解决方案--从传感器机制到系统特性。首先将回顾传感器的一些重要性能指标,以及在传感器选型中应当考虑的潜在误差和漂移机制。本文还会重点介绍通过集成、融合和处理来增强传感器的方法,例如通过采用卡尔曼滤波。然而,在展开详细论述之前,回顾惯性微机电系统(MEMS)传感器技术的一些基本原理可能会有帮助。
1 MEMS基本原理
一度被认为是奇思异想的MEMS技术,现已成为我们大多数人每天都会碰到的成熟技术。它使我们的汽车更加安全,增强了手机的可用性,能够测量和优化工具及运动设备的性能,并且不断提高对住院病人和门诊病人的医疗护理水平。

表1 按运动类型划分的医疗应用
用于线性运动检测的MEMS器件通常是基于一个微加工的多晶硅表面结构,该结构形成于硅晶圆之上,通过多晶硅弹簧悬挂在晶圆的表面上,提供对加速度力的阻力。在加速度下,MEMS轴的偏转由一个差分电容测量,该差分电容由独立固定板和活动质量连接板组成。这样,运动使差分电容失衡,导致传感器输出的幅度与加速度成正比。举一个大家熟悉的例子,
当汽车由于碰撞而突然急剧减速时,安全气囊传感器中的MEMS轴会产生同样的运动,使得电容失衡,最终产生信号触发安全气囊打开。这一基本加速度计结构,根据不同的应用性能参数进行调整并增加数据处理功能后,可以精确地指示倾斜度、速度甚至位置。还有一种与此不同但技术上相关的结构是陀螺仪,它能检测旋转速率,输出形式为度/秒;加速度计则是检测重力。
2 将运动检测转化为对医疗保健有用的信息
通过一个功耗极低的紧凑器件来精确检测和测量运动的能力,几乎对任何涉及到运动的应用都是有价值的,甚至对那些运动要求不是很关键的应用也是有价值的。表1按运动类型列出了一些基本医疗应用。需要解决更多挑战的更高级应用将在稍后讨论。
2.1 超越简单的运动检测
虽然简单的运动检测,例如一个轴上的线性运动,可能很有价值,但多数应用都涉及到多个轴上的多种类型运动。捕捉这种多维运动状态不仅能带来新的好处,而且能在轴外扰动可能影响单主轴运动测量的情况下保持精度。
许多情况下,为了精确测定对象所经历的运动,必须将多种类型(例如线性和旋转)的传感器结合起来。例如,加速度计对地球的重力敏感,可以用来确定倾角。换言之,让一个MEMS加速度计在一个+/-1g重力场中旋转时(+/-90°),它能够将该运动转换为角度表示。然而,加速度计无法区分静态加速度(重力)与动态加速度。这种情况下,加速度计可以与陀螺仪结合,利用组合器件的附加数据处理能力可以分辨线性加速度与倾斜(即当陀螺仪的输出显示旋转与加速度计记录的视在倾斜重合时)。随着系统的动态程度(运动的轴数和运动自由度)增加,传感器融合过程会变得更加复杂。
了解环境对传感器精度的影响也很重要。显而易见的一个因素是温度,可以对其进行校准;事实上,高精度传感器可以重新校准,并且自身进行动态补偿。另一个不那么明显的考虑因素是潜在的振动,即使很轻微的振动也会使旋转速率传感器的精度发生偏移,这种效应称为线性加速度效应和振动校正,其影响可能很严重,具体取决于陀螺仪的质量。在这种情况下,传感器融合同样能够提高性能,即利用加速度计来检测线性加速度,然后利用此信息和陀螺仪线性加速度灵敏度的校准信息进行校正。
许多应用要求多自由度的运动检测。例如,6自由度惯性传感器能够同时检测x、y、z轴上的线性加速度和旋转运动(也称为滚动、俯仰和偏航),参见图1。
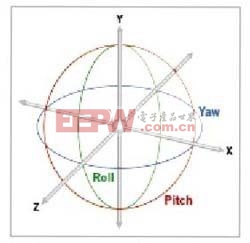
图1 全运动评估所需的6自由度运动测量:x、y、z轴线性运动和滚动、俯仰、偏航角速率转动导航--从车辆到手术仪器#e#2.2 导航--从车辆到手术仪器
惯性传感器在工业中用作辅助导航器件已经相当广泛。通常,惯性传感器与GPS等其他导航设备一起使用。当GPS访问不可靠时,惯性导航可以利用所谓航位推算技术来弥补空隙。除了最简单的导航之外,多数解决方案都会依赖多种类型的传感器,在所有条件下提供所需的精度和性能。GPS、光学和磁性检测技术已广为认知,相关产品也很丰富。然而,每种技术都有其不足之处,即使一起使用,互相之间也不能完全补偿彼此的不精确性。MEMS惯性传感器则有可能完全补偿传感器的不精确性,因为它不存在上述干扰,并且不需要外部基础结构:无需卫星、磁场或相机,只需惯性。表2列出了主要的导航传感器技术及其优缺点。
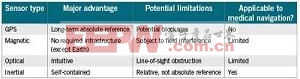
表2 广泛应用的导航传感器及其对医疗导航的适用性
就像车辆导航设备会发生GPS遮挡问题一样,医疗系统所用的光学导航技术也会遇到视线遮挡问题。发生光学遮挡时,惯性传感器可以执行航位推算,从而通过冗余检测增强系统的可靠性。
2.3 医疗导航
符合表2所列原则的一个医疗应用是在手术室使用惯性传感器,使人工膝关节或髋关节能够与病人独特的骨骼结构更精确地对准。本例的目标是让植入体与患者自然轴的对准误差小于1°。95%以上的全膝关节置换(TKA)手术采用机械对准方法,它所产生的典型误差为3°或更大。使用光学对准的计算机辅助方法已经开始取代一些机械程序,但可能由于设备开销较大,推广过程缓慢。无论使用机械对准还是光学对准,这些手术中大约30%都会有未对准的情况(定义为3°以上的误差),使病人感觉不舒服,常常需要进行额外的手术。降低对准误差的可能好处包括:缩短手术时间、增强病人舒适感以及使关节置换效果更持久。
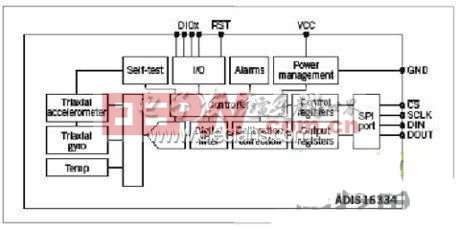
图2 基于MEMS的惯性测量单元提供6自由度运动测量, 结构紧凑,适合用于手术仪器
完整多轴惯性测量单元(IMU)形式的惯性传感器已证明能够显着提高TKA手术的精度。ADIS16334(图2)等器件包含所需的全部检测功能--三个线性传感器和三个旋转传感器,可取代基于机械和光学的对准技术。该器件利用多种类型的传感器和嵌入式处理来动态校正传感器漂移,如陀螺仪的线性加速度偏移、线性和旋转检测的温度漂移等。通过标准4线串行外设接口(SPI),可以与这个相对复杂的精密传感器套件轻松接口。
MEMS惯性传感器可靠度高(汽车行业20年的应用历史证明了这一点),它在手机和视频游戏中的成功应用说明它在商业上极具吸引力。然而,不同应用对性能的要求大不相同,适合游戏的器件并不能解决本文所述的高性能导航问题。对于导航,重要的MEMS性能指标是偏置漂移、振动影响、灵敏度和噪声。精密工业和医疗导航所需的性能水平通常比消费电子设备所用MEMS传感器的性能水平高出一个数量级。表3列出了有助于传感器选型的一般系统考虑。
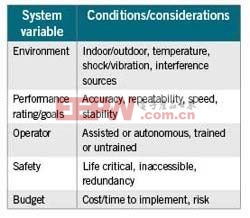
表3 系统目标/约束条件有助于传感器选型
大多数系统都会集成某种形式的卡尔曼滤波器,以便有效合并多种类型的传感器。卡尔曼滤波器将系统动力学模型、传感器相对精度和其他特定应用的控制输入纳入考虑,有效确定最切合实际的运动情况。高精度惯性传感器(低噪声、低漂移、相对温度/时间/振动/电源变化保持稳定)可以降低卡尔曼滤波器的复杂度,减少所需冗余传感器的数量,以及减少对容许系统工作方案的限制条件数量。
3 医疗MEMS的复杂性
虽然传感器已实现各种各样的医疗应用,从相对简单的运动捕捉到复杂的运动分析,但医用传感器的高性能要求提出了复杂且涉及到大量计算的设计挑战。幸运的是,解决这些新一代医疗挑战所需的许多原理均基于经工业导航应用验证的方法,包括传感器融合和处理技术。在医疗导航领域,运动的复杂性以及精度和可靠性要求将推动多处理器、附加传感器后处理、复杂算法、复杂测试和补偿方案的发展。













评论