
基于模糊PID算法的婴儿培养箱的研究
 引言
引言
婴儿培养箱主要应用于早产儿、低体重儿、病危儿或发育不良的新生儿的临床医疗。在儿科的医疗护理中占有重要地位,是医院不可或缺的医疗器械[1][2]。由于此类婴儿的特殊性,所以婴儿培养箱对控制精度、稳定性能和安全性都有较高要求。现今市场上的婴儿培养箱大多采用传统的PID算法。常规PID算法是过程控制中应用最为广泛的一种基本控制规律,具有稳定性高、鲁棒性好等优点。但其对时变非线性系统来说控制就难以达到很好的效果。本文采用模糊PID算法对婴儿培养箱的温度加以控制,系统的动静态特性得到进一步改善。
1 婴儿培养箱温度控制系统的设计
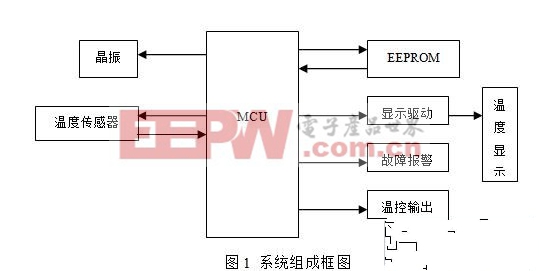
本系统利用单片机技术对培养箱温度实施伺服控制,开机即可自动进入箱温控制状态。温度控制监测仪是仪器的核心部件,具有温度设置,实时温度监测等功能。系统组成框图如图1所示:
婴儿培养箱内的空气温度具有延迟性,从检测到箱内温度小于设定值到加热器开始加热,箱内温度会持续降低一段时间,当加热停止时,温度并不会马上停止上升而是上升一段时间后才停止。因此,婴儿培养箱内的温度一直在上下波动。采用模糊自适应PID控制可以较好的解决此类问题,微分控制分量可以改善系统的动态特性,而积分控制分量可以减少系统静差。
2系统的硬件结构
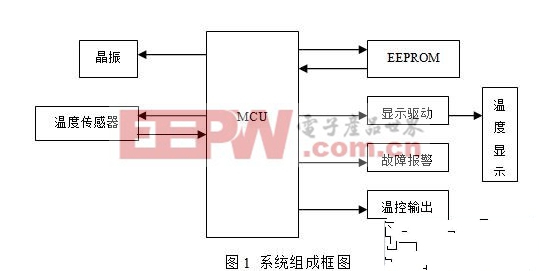
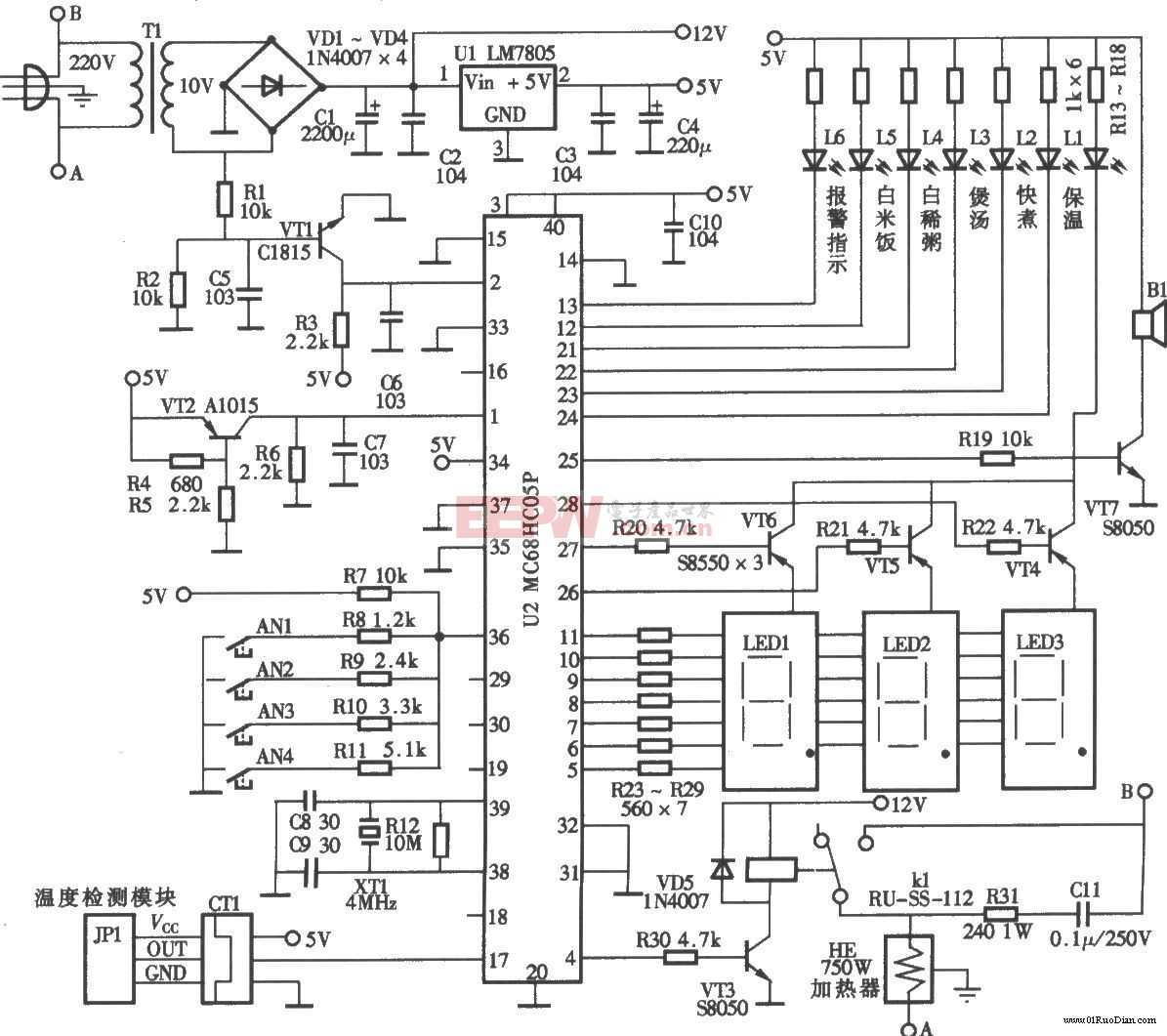
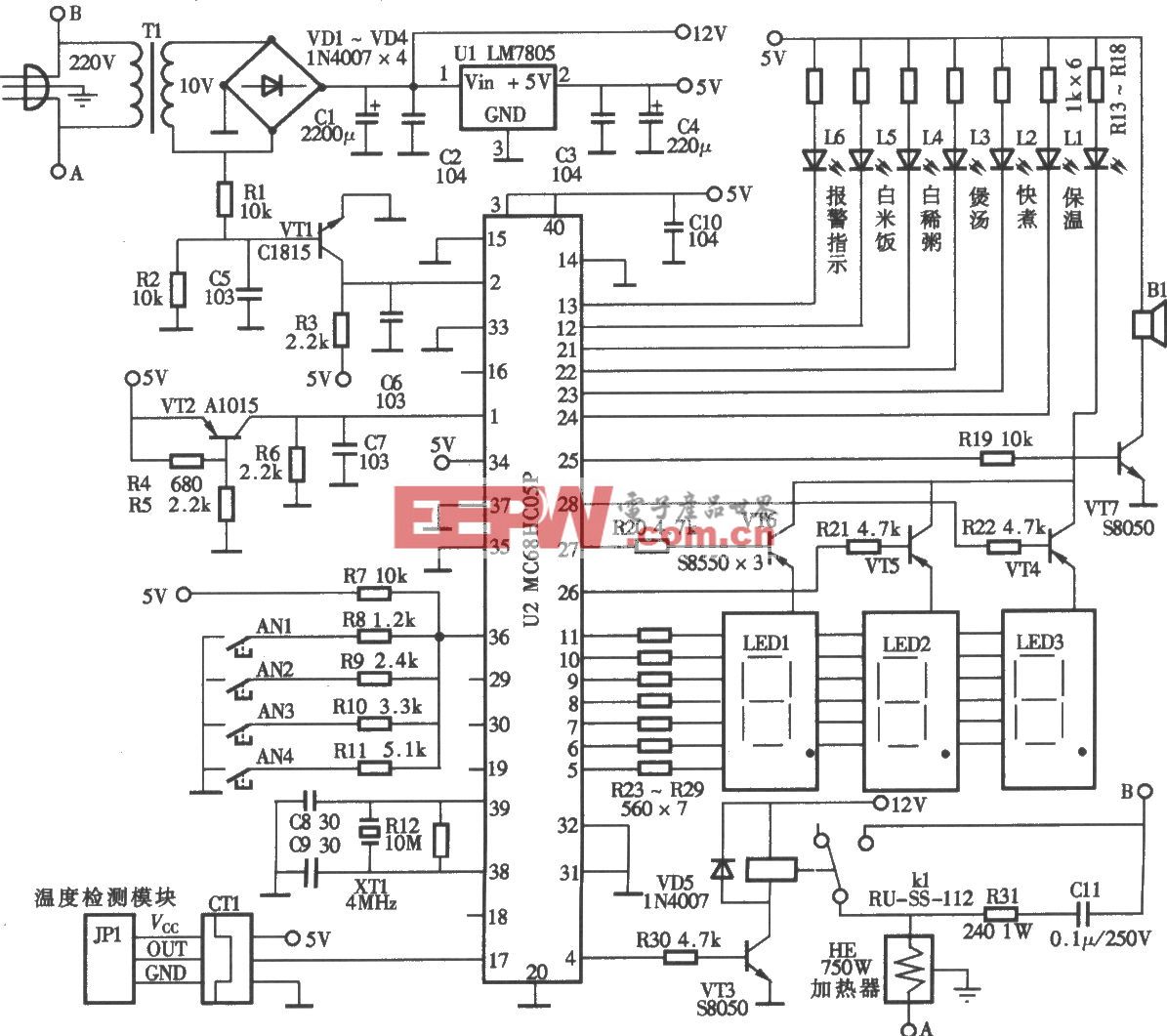
本系统硬件结构控制芯片选用16位低功耗MSP430系列单片机[3][4],采用DS18B20温度传感器将婴儿培养箱的温度测量值通过单线传入单片机I/O口,与传统的热敏电阻相比,它能够直接读出被测温度,并且可根据实际要求通过编程实现9~12 位的数字值读数方式;可以分别在93. 75 ms 和750 ms 内完成9 位和12 位的数字量。温度测量值在单片机内部经过模糊自适应PID运算后,输出控制信号给光耦离合器,以实现输入信号和输出信号的隔离,减少干扰,和实现信号的放大。放大后的信号用于控制可控硅,从而实现对加热丝工作与否的控制。通过键盘和液晶显示分别实现对温度值进行标定,定时显示温度值,设定上下限报警值等功能。具体电路如图2所示。
3软件设计
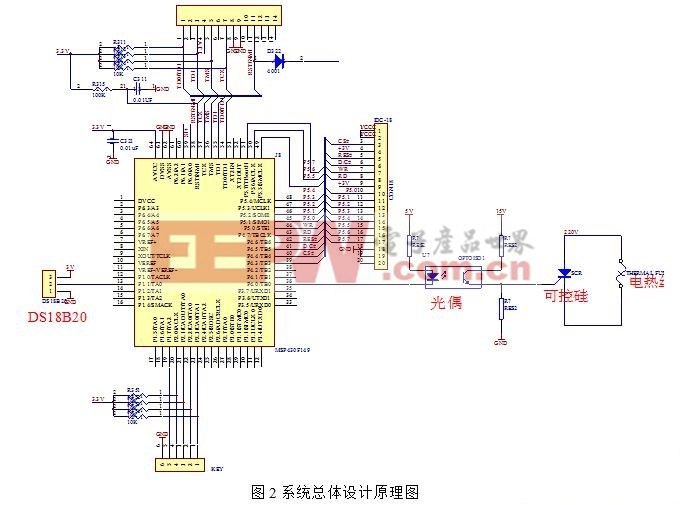
软件设计主要采用自适应模糊PID控制方法[5][6][7][8]。模糊控制是一种以模糊控制论、模糊语言变量及模糊逻辑推理为基础的新型计算机智能控制。与传统的PID算法相结合形成了模糊自适应控制理论,运用模糊推理实现PID参数的自动调整。
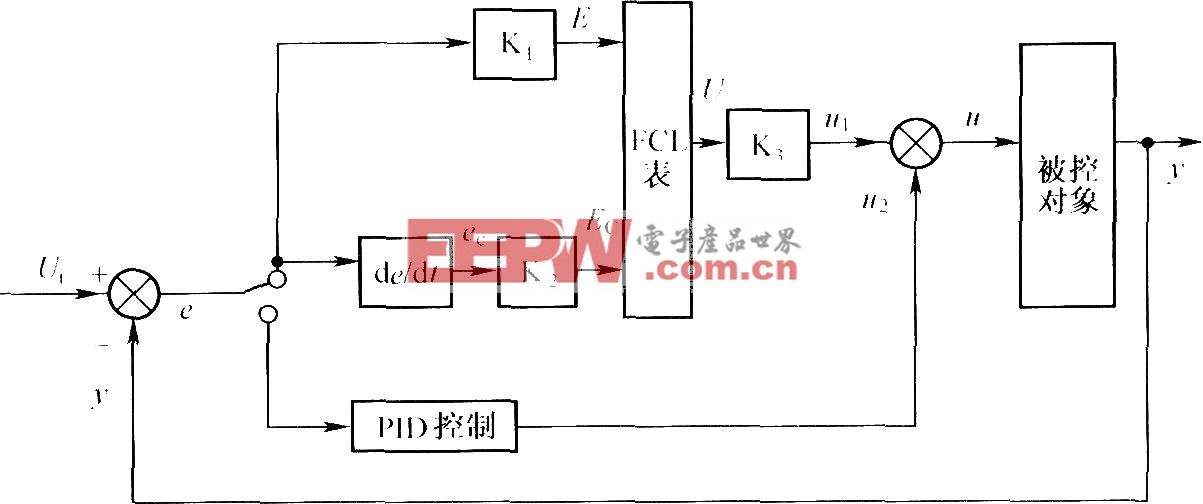
自适应模糊PID控制器以误差E和误差变化Ec作为输入,可以满足不同时刻偏差E和偏差变化率Ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,如图3所示。
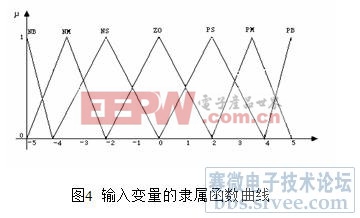
设定输入变量E和Ec语言值的模糊子集为{负,负中, 负小, 零, 正小, 正中, 正大}, 并简记为{NB,NM, NS, ZO, PS, PM, PB}, 将误差E 和误差变化率Ec 量化到( - 5, 5) 的区域内,输入变量的隶属函数曲线如图4所示。同样, 设计输出量KP、KI和KD的模糊子集为{ZO, PS, PM, PB}, 并分别将其量化到区域( 0, 3) ,(0,0.2),(0,0.8)内。
根据参数KP、KI和KD对系统输出特性的影响情况,根据实验经验总结得到KP、KI和KD的控制规则表,见表1,表2和表3,它反映和描述了以往婴儿培养箱在不同条件和要求下的控制经验和知识,是模糊推理的规则集。


根据规则表结合婴儿培养箱控制的规律,对PID参数KP总结出下列49条模糊控制规则:
if E=NB and EC=NB, then KP=PB
if E=NB and EC=NM, then KP =PB
┇
if E=PB and EC=PB, then KP=PB
E、EC为模糊输入变量,KP为模糊输出变量;NB、PB,NM等为论域上的模糊集。
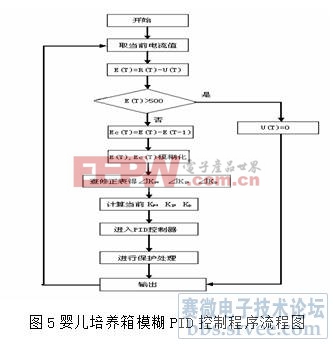
模糊PID控制器的工作流程图如图5所示,图中U(T)是当前温度采样值,E(T)、E(T-1)分别为当前误差和上次采样误差,Ec (T)为当前误差变化率,U(T)是PID运算结果。
4 实验结果
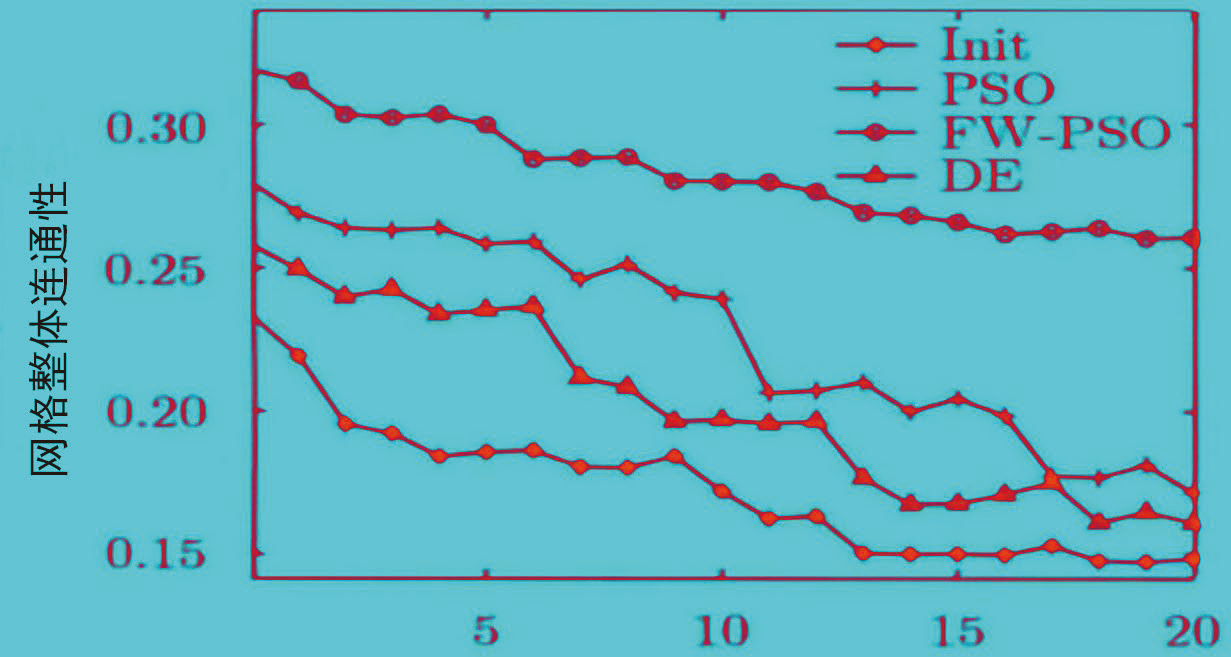
为提高加温系统的安全性,一般采取较小功率长时间加温的方法。在环境温度为26℃,环境湿度60%RH的情况下,将婴儿培养箱的箱温设定为32℃,婴儿培养箱分别采用常规PID与模糊PID两种方法控制其温度,测量将其箱温设定在32℃时的效果,在一个周期内使用模糊PID控制的相应速度比传统PID缩短了约3分钟,控制效率提高34%,而且控制稳定后的温度峰峰值为0.3度,传统PID控制为0.5度。结果曲线对比如图5所示:
1 PID control 2.Fuzzy PID control
5结论
采用模糊 PID控制婴儿培养箱的箱温,在控制过程中模糊 PID 控制器根据系统的实际状态实时调整 PID参数。从实验结果可以看出,采用模糊PID控制的婴儿培养箱,可以使系统的过渡时间及超调量能尽可能减少,升温速度较快,改善了系统的稳定度,提高了抗干扰性能,收到了良好的预期效果。





评论