
基于CAN总线的汽车车身控制系统的研究与应用
科学的发展使得汽车正增加着越来越多的功能,如何使这些众多的独立功能协调统一工作,亦即如何对整个车身进行控制,已经成为整个汽车电子研究领域中非常重要的课题。汽车网络,即汽车总线技术在这种环境下应运而生了。而CAN 总线技术以其高实时性、高可靠性在各种汽车控制总线中独占鳌头。
本文引用地址:http://www.amcfsurvey.com/article/197820.htm1 CAN 总线技术简介
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。CAN 最初出现在80 年代末的汽车工业中,由德国Bosch 公司最先提出。CAN 是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10km 时,CAN 仍可提供高达50Kbit/s 的数据传输速率。目前CAN 总线已经形成国际标准,广泛应用于欧美轿车,被公认为几种最有前途的现场总线之一。
2 系统设计思想
汽车车身系统的控制对象包括: 4 个车门锁、2 个以上车窗玻璃升降器、行李箱锁、除霜加热器、电动后视镜、前后大灯、小灯、转向灯、危险灯、雾灯、牌照灯、车内阅读灯、车厢顶灯等。在具备遥控功能的情况下,还包括对遥控信号的接收处理和防盗系统的控制。因此,根据以上要完成的各功能,将本系统设计为 5 个子模块,分别是中央控制模块( 实现中控门锁、防盗、雨刮、内外灯和后窗及后视镜加热等功能) ,4 个门控模块( 分别为主驾门模块、右前门模块、左后门模块、右后门模块,来控制车窗升降器和门锁)。
图1 给出了车身控制模块CAN 总线结构。
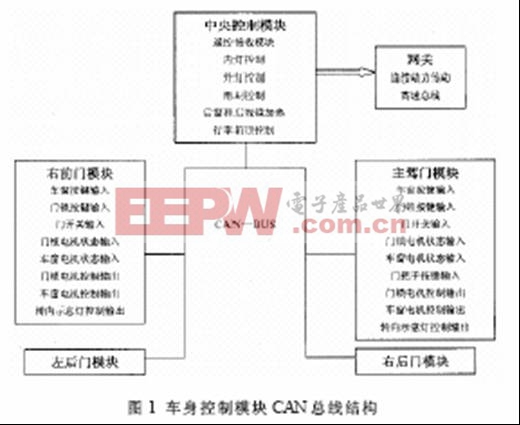
3.1 系统各模块电路框图
根据以上设计思想分为5个子模块。
主控单元接收开关信号之后,先进行分析处理,然后通过CAN总线把控制指令发送给各受控端,各受控端响应后作出相应的动作。











评论