
基于模糊控制的汽车灯光随动系统仿真
摘要:利用模糊控制的原理,把方向盘转角传感器和车速传感器检测到的信号进行模糊化处理,计算得到汽车行驶的转弯半径,把输出结果传递给汽车前照灯控制系统,从而实现汽车前照灯的灯光随动控制。完成了灯光随动系统的设计,并利用Matlab软件对系统进行仿真,验证灯光随动系统控制的效果。
关键词:智能前照灯;模糊控制;灯光随动;Matlab
自适应前照灯系统(Adaptive Front-lighting Systern,AFS)是使近光灯光轴在水平方向上与转向盘转角联动进行左右转动,在垂直方向上与车高联动进行上下摆动的灯光随动系统。它使得近光灯的照射光线能转向车辆的前进方向,在夜间行驶时,前方的交叉路口、弯道处的可视性能得到提高,能够有效地降低驾驶员在夜晚弯路上行车的疲劳程度,使驾驶者能够看清转弯处的实际路况,进而有充分的时间来应付紧急情况,从而明显提升夜晚弯路上行车的安全性。
1 汽车灯光随动系统的工作原理
汽车灯光随动系统的工作原理如图1所示。汽车灯光随动系统共由四部分组成:传感器、ECU、车灯控制系统和前照灯。汽车车速传感器和方向盘转角传感器不断地把检测到的信号传递给ECU,ECU根据传感器检测到的信号进行处理,把处理完后的数据进行判断,输出前照灯转角指令,使前照灯转过相应的角度。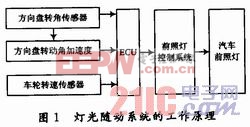
汽车在转弯时,重点是要提前看到所转方向的障碍物,根据现实驾驶的经验,车灯一般只需转过O~15°即可,只需要所转方向侧的那只前照灯实现智能转向就可,另一侧前照灯还是保持原来的方向。虽简化了控制,仍然能够达到预期的效果。
2 模糊控制系统的组成和实现过程
一个模糊控制系统必须包含一些必要的部件。模糊控制属于计算机数字控制的一种形式,它的组成类似于一般的数字控制系统,如图2所示。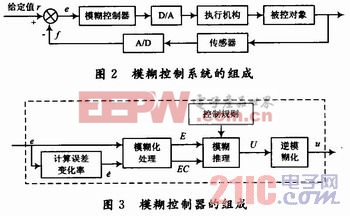
模糊控制器的组成如图3所示,它主要包括输入量的模糊化、模糊推理和逆模糊化(或称模糊判决)三部分。模糊控制器的实现可由模糊控制通用芯片实现或由计算机(或微处理机)的程序来实现。










评论