
基于CAN总线的自动离合器控制器设计
摘要: 设计了一种基于CAN 总线的自动离合器控制器, 采用高性能微处理器XC878 完成离合器控制器软硬件开发。设计了离合器执行电机的驱动电路及自动离合器控制程序。针对离合器与发动机协调控制的需要,设计了CAN 总线节点接口电路及一套简单、实用、高效的CAN 总线通信协议。
本文引用地址:http://www.amcfsurvey.com/article/197485.htm试验表明,所设计的自动离合器控制器在功能上满足实际应用的需要,CAN 通信模块能够准确无误地收发数据,可靠性高。
随着社会的发展, 人们对汽车的舒适性和安全性要求越来越高, 而手动档汽车因其繁重的选换档及离合器操作增加了驾驶难度。对于驾驶新手而言, 又会产生坡道起步易熄火、油耗大、离合器磨损严重等问题[ 1]。自动档汽车虽然驾驶操作简单, 但其造价高,开发难度大。本文设计的电控自动离合器ACS(Automatic Clutch System) 是在手动变速箱基础上安装电控系统,取消离合踏板,实现自动离合。ACS 的优势十分明显:与手动挡相比,其驾驶操控更为简单, 具有加速快、驾驶舒适的特点; 与自动变速器汽车相比,ACS 具有造价便宜、维修方便、经济、省油。
1 系统功能
ACS 将现代电子控制技术用于控制干式摩擦离合器, 模拟优秀驾驶员的操纵动作和感觉, 实现最佳的离合器结合规律, 其实质是为汽车驾驶员配备一个操纵离合器的机械人, 实现自动离合器的功能。本文设计的ACS 控制器主要实现了如下几大功能。
(1) 换档离合: 控制器接收到换档信号后, 离合器迅速自动分离, 换档到位后离合器自动结合, 结合规律由电控单元依据汽车行驶工况确定。
(2) 坡道起步: 驾驶员踩制动踏板, 启动发动机, 将换档手柄置于一档或倒档, 松开手制动器, 解除制动后不踩油门踏板汽车能够自动慢速行驶, 起步平稳, 冲击小,不熄火。
(3) 熄火保护: 汽车行驶过程中, 车速和发动机转速低于设定值后离合器自动分离, 车速和发动机转速高于设定值后离合器再自动结合。
(4)CAN 通信:ACS 控制器通过CAN 总线接口与发动机控制器实现数据通信, 为离合器与发动机的协调控制提供数据支持。
2 系统的硬件设计
2.1 控制器组成
自动离合器控制器原理框图如图1 所示。本系统的微处理器选用英飞凌高性能的8 位微处理器XC878CM, 工作频率最高可达27 MHz, 其片内硬件资源十分丰富, 片内集成了MultiCAN 控制器、捕获/比较单元6(CCU6) 、高性能ADC 模块等。XC878CM 出色的性能完全满足本系统的设计需要。本系统的硬件部分主要包括电源模块、数据采集模块、CAN 通信模块、执行电机驱动模块等。
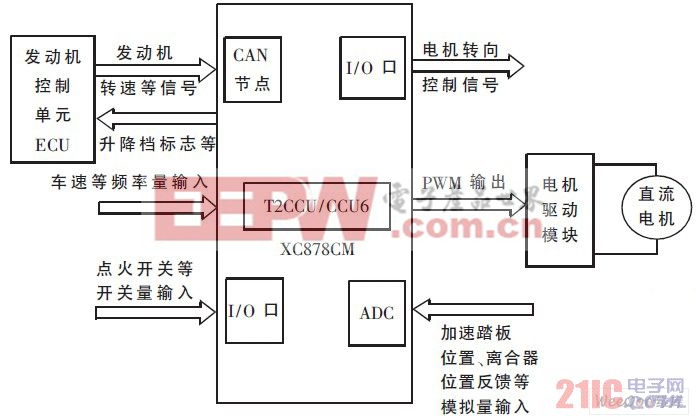
图1 自动离合器控制器原理图
(1) 电源模块整车低压控制系统通过12 V 电池供电,8 位MCU 采用5 V 供电。所以本系统需要采用电源芯片进行电压的转换和隔离。本系统选用英飞凌电源芯片TLE4290 , 该芯片可提供稳定的5 V 电压, 误差在2%以内, 输入电压最高可达42 V。经测试, 其工作可靠, 满足系统要求。
(2)CAN 通信模块CAN 通信模块使用XC878CM 片内MultiCAN 控制器和英飞凌高速CAN 收发器IFX1050G作为CAN 通信的硬件组成。CAN 模块负责离合器控制器和发动机控制器之间的数据交换和共享, 为发动机与离合器的协调控制提供数据通信支持。
(3) 执行电机驱动模块本系统使用的执行电机为额定电压为12V 的直流电机。单片机使用一个IO 口控制执行电机的转动方向, 一路PWM 输出控制电机的转速。
PWM 波由单片机内含的CCU6 模块配置为比较模式产生。单片机通过英飞凌电机驱动芯片BTS7810K 实现对执行电机的控制。










评论