
基于车载CAN总线的倒车雷达单元设计
摘要:倒车雷达在汽车中得到广泛应用,但没有与车载CAN总线网络相联系,造成其功能不完善。用PIC18F258单片机设计一个倒车雷达单元,使倒车雷达能够被车栽网络识别,实现与CAN总线的数据通信与资源共享,完成倒车雷达的自动刹车功能。
关键词:CAN总线;倒车雷达;PIC18F258;报文
0 引言
目前的汽车电子领域中,倒车雷达普遍采用超声波测距原理,通过单片机计算出障碍物与车的距离并显示和报警。但大多数这类产品都是独立的控制单元,无法与CAN总线接轨,所以只能作为一种倒车安全辅助装置。用PIC18F258单片机设计一个倒车雷达单元使其与车载CAN网络接轨,这样可以将实测的车与障碍物的距离信息以报文形式发送给车载CAN总线上的其他控制单元,以实现其必要的功能。当车与障碍物距离小于某一值时,通过制动单元实现自动制动功能,保证车辆倒车安全;CAN总线上仪表控制单元接收到车与障碍物距离信息后,可将其距离显示出来;CAN总线上语音设备接收到信息后,可根据距离大小实现不同频率分级语音报警。这样实现了倒车雷达单元在CAN总线上与其相关单元的数据共享,扩展了倒车雷达的功能,同时也提高了倒车的安全性。
1 CAN总线与车载CAN网络通信
1.1 CAN总线
CAN总线是一种保密性很高的现场总线,是德国Bosch公司在20世纪80年代初为解决现代汽车中众多的控制和测试仪器之间的数据交换而开发的一种有效支持分布式控制或实时控制的串行通信网络。它具有以下特点:
(1)总线以多主方式工作,系统柔性好,通信方式灵活,且不用占地址等单元信息;
(2)CAN总线网络上的单元信息分不同的优先级,可满足不同的实时要求,所有的信息发送都以固定格式发送;
(3)采用非破坏性总线仲裁技术,在网络负载很重的情况下也不会出现网络瘫痪状况;
(4)只通过报文滤波可以实现点对点、一对多点及全局广播等几种方式接收传送数据;
(5)通信速率与距离成反比,5 Kb/s以下速率直接通信可达10 km,40 m内通信最高速率可达1 Mb/s;
(6)具有错误检测功能、错误通知功能、错误恢复功能;
(7)CAN总线单元在出现严重错误情况下会自动关闭输出功能,以便总路线上其他单元的操作不受影响;
(8)CAN总线单元数理论上可以是无数个,但一般受通信速率限制,单元越多,通信速率越低,所以单元数还是有限的。
1.2 车载CAN网络通信
现代汽车内部的主要控制单元有:发动机控制单元、ABS控制单元、安全气囊控制单元、自动变速器控制单元、仪表管理单元、车窗控制单元、牵引力控制单元、故障诊断单元、中控门锁单元、座椅调节单元、照明控制单元、空调控制单元、雨括控制单元、后视镜控制单元等。这些控制单元通过CAN总线构成一个实时通信控制网络,如图1所示。
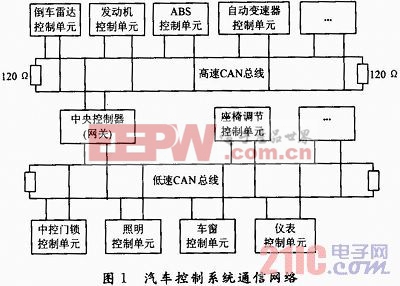
网络中各控制单元发出的控制指令必须迅速、可靠、及时地得到响应,否则轻则就有可能使车辆局部控制失灵,重则就有可能发生车毁人亡的重大事故。若整辆汽车的所有控制单元都连接在一个CAN总线网络上,所有的控制单元都通过一对CAN网络线进行通信,很容易出现总线上工点过多,通信速率下降,系统实时响应速度下降,将导致关键控制部位的实时响应速度得不到保证。因此在对汽车上各控制单元的实时性分析之后,根据各控制单元对实时性的要求不同,设计了高、低两个速率不同的CAN通信网络。将实时性要求严格、可靠性要求高的发动机控制单元、倒车雷达控制单元(本课题设计部分)、ABS控制单元、自动变速器控制单元和安全气囊控制单元组成高速CAN通信网络,将实时性要求相对较低的中控门锁控制单元、电动座椅调节单元、电动车窗控制单元、后视镜控制单元、雨括控制单元和照明灯控制单元等组成低速CAN通信网络,并配置中央控制器(网关)将这两个速率不同的CAN通信网络连接起来,实现全部节点之间的数据共享。高速CAN网络的传输速率达到500 Kb/s,低速CAN网络的传输速率大约是10~125 Kb/s。图1中总线两端应接抑制反射的120 Ω的终端匹配电阻,如果不接终端电阻,会使得数据通信的抗干扰性及可靠性大大降低,甚至无法通信。












评论