
一种基于车载MP3播放机的倒车雷达设计
1.2 主要器件选择
考虑到该款车载MP3播放机的功能要求,以及生产成本、芯片内部资源、等因素,本系统使用EM78P153实现倒车雷达设计中数据采集模块。该芯片具有32×8 b片内SRAM、1 024×13 b片内ROM、12个可编程的双向复用I/O、1个8位实时计时/计数器TCC、1个可编程自由运行看门狗定时器WDT。EM78P153芯片既满设计要求,又具备价格优势,且技术成熟度较高,故成为方案设计首选。
语音芯片选择性价比较高的AK020,它是一款一次性烧录语音IC芯片。其主要特点是脚位少、体积小,有DAC和PWM驱动方式语音输出,外围元器件少。芯片可容纳最多64组声音。用户可选择的8位5位和4位数据压缩。支持3模式触发功能:独立模式、串行触发模式、CPU命令模式。
2 方案原理
倒车雷达,又称泊车辅助系统。它是汽车泊车或者倒车时的安全辅助装置,由超声波传感器、控制器、显示器和语音芯片等部分组成。它能以语音和更为直观的LCD显示告知驾驶员周围障碍物的情况,避免了驾驶员倒车时障碍物损伤汽车,甚至引发交通事故,并帮助驾驶员扫除了视野死角,增强汽车的后视能力,提高驾驶的安全性。
超声波测距原理是借助超声波指向性强,能量缓慢消耗的特点,通过超声波发射器向某一方向发射超声波。在发射时刻的开始进行计时。超声波在空气中传播时遇到障碍物立即被反射回来,超声波接收器在收到反射波就立即停止计时。超声波在空气中的传播速度为v,而根据计时器记录的发射超声波和接收到回波的之间的时间t,就可以计算出发射点和障碍物之间的距离l,即:
l=vt/2 (1)
这就是超声波时间差测距法。
倒车雷达数据采集系统如图3所示,该系统由数据采集芯片EM78P153发送40 kHz的信号以及4路通道选择信号控制超声波信号的发射。当驾驶员将手柄转到倒车档后,车载MP3播放机自动转换进入倒车模式,并且启动计时/计数器TCC,接收到回波信号后关闭TCC。通过计时/计数器TCC准确测出超声波从发射到遇到障碍物反射返回的时间,根据超声波的速度计算出汽车与障碍物之间的探测距离,并将探测距离发送到主控芯片。通过主控芯片将探测距离实时地显示在LCD上,并发出相应的报警提示。本文引用地址:http://www.amcfsurvey.com/article/197009.htm

3 系统部分设计
3.1 EM78P153数据发送
芯片EM78P153采集到探测距离的数据后,通过单线接口方式将4路数据发送到主控芯片上。考虑到传输距离很短,在数据编码中没有采用校验,具体编码有以下特征:
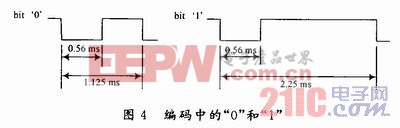
采用脉宽不同的串行码,以脉宽为0.565 ms、间隔0.56 ms、周期为1.125 ms的组合表示二进制的“0”;以脉宽为0.565 ms、间隔1.685 ms、周期为2.25 ms的组合表示二进制的“1”,其波形如图4所示。
上述0和1组成连续的32位二进制码组,前16位是分别是超声波发射/接收器1和超声波发射/接收器2采集到的探测距离,后16位是分别是超声波发射/接收器3和超声波发射/接收器4采集到的探测距离,如图5所示。其中引导码由9 ms的低电平和4.5 ms的高电平组成。其中8位数据码,第7位和第6位组合表示4路传感器,“00”表示传感器1,“01”表示传感器2,“10”表示传感器3,“11”表示传感器4;第5位始终等于0;剩下的5位数据表示探测距离。













评论