
车用磁阻传感器式电子罗盘系统的开发
中心论题:
本文引用地址:http://www.amcfsurvey.com/article/196298.htmHMC1055系列各向异性磁阻传感器。
三维电子罗盘的总体设计。
车载罗盘系统的干扰校正。
解决方案:
对传感器敏感元件施加一个瞬态的强恢复磁场恢复或保持传感器特性。
采用标定的方法消除硬铁影响干扰。
三轴设计和姿态补偿使罗盘处于任何姿态时均能正常使用。
罗盘是一种重要的导航工具,已广泛应用于飞机和航海导航等领域。一般在飞机和航海导航系统中使用的惯性导航系统由于价格昂贵、结构复杂、导航误差随时间累计等原因而不适合车载使用;传统的罗盘虽然价格便宜,但不能工作于像行驶的汽车这种不稳定的环境中。另外,传统罗盘不能够电子输出,其信号不能集成到汽车的控制系统中,给实现基于精确导航的智能交通带来了不便。
本文针对以上问题,充分考虑到汽车内部环境的不平稳性以及汽车发动机等对磁场的干扰,利用磁阻传感器设计了一种车载磁阻式电子罗盘系统。
HMC1055系列各向异性磁阻传感器
HMC1055系列集成了HMC1051Z单轴磁阻传感器、HMC1052双轴磁阻传感器和一个二轴MEMSIC MXS3334UL加速度传感器。
HMC1052是一个双轴线性磁阻传感器,每个传感器都有一个由铁镍薄膜合金组成的惠思顿桥。当桥路加上供电电压时,传感器将磁场强度转化为电压输出。HMC1052包含两个敏感元件,它们的敏感轴相互垂直,且参数相互匹配。内部电路如图1所示。
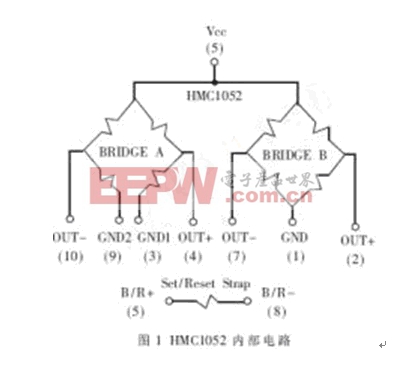
除了惠思顿电桥,HMC1052还有两个位于芯片上的磁耦合带:偏置带和置位/复位带。两个敏感元件都有这两个带。置位/复位带用于确保精度;偏置带用于校正传感器或偏置任何不想要的磁场。
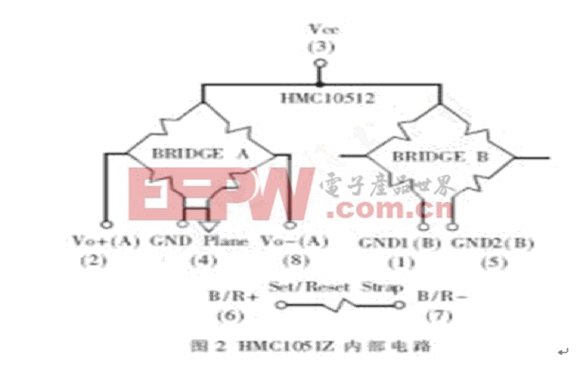
HMC1051Z为HMC1052的单轴版本,其参数与HMC1052相同。HMC10512内部电路如图2所示。
MEMSIC MXS3334UL是一个二轴的加速度传感器,它能够提供一个用数字表示的重力加速度值。当传感器被水平放置时,两个输出口提供一个100Hz、50%占空比的方波。随着传感器的倾斜,它的输出占空比发生变化[1]。
三维电子罗盘总体设计
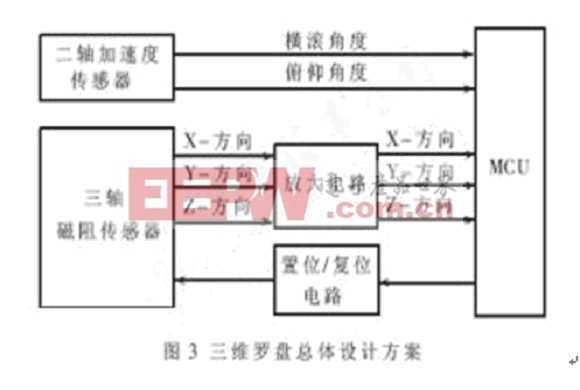
地球磁场的强度为0.6高斯左右,现有的磁阻传感器可以很好地测量地磁场范围内的磁场强度。由于二维罗盘只能在保持水平的情况下正常工作,如果用于车辆的动态环境中,将不可能保证其永远水平,所以在这种场合下,罗盘的可使用性大大降低。于是需要设计三维罗盘以适应各种姿态的测量。三维电子罗盘的总体设计方案如图3所示。三轴磁阻传感器分别从X、Y、Z 三个磁场强度方向输出电压,经过放大电路分别输入到三个具有A/D转换能力的MCU端口,二轴加速度传感器测量俯仰角度和横滚角度,测量参数的意义如图4所示。
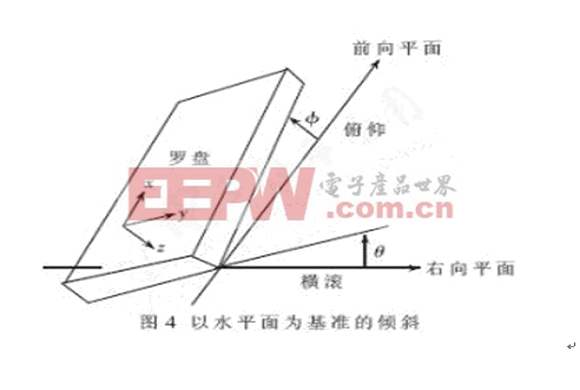
将测量出的X、Y、Z、θ、Φ代入式(1)、(2):
H=Xcos(Φ)+Ysin(θ)sin(Φ)-Zcos(θ)sin(Φ)(1)
H=Ycos(θ)+Zsin(θ)(2)
从而得到磁场强度在水平面内的分量(XH、YH),由式(3):
方位角Φ=arctan(YH/XH)(3)
就可以计算出方位角Φ的值。
三维电子罗盘系统的硬件设计
磁阻式罗盘由五部分组成:三轴磁阻传感器、二轴加速度传感器、信号放大电路、置位/复位电路、MCU系统等。
a 放大电路的设计
各向异性磁阻(AMR)传感器由惠斯顿电桥进行工作,并且传感器输出电压很小,需要放大才能进行A/D转换。下面以HMC1052为例进行分析。HMC1052的灵敏度为±1.0mV/V/高斯,电桥偏置电压值为±1mV/V。在桥路电压3V和625毫高斯最大的磁场强度下,桥路偏置电压为:
Vo f f =(3.0V)×(±1.0mV/V)=±3.0mV
最大的磁场摆幅为:
V磁场=(3.0V)×(±1.0mV/V/Guass)×(0.625Guass)=±1.875mV
因此电桥输出的总摆幅为:
Vout =Vo f f +V磁场=(±3.0mV)+(±1.875mV)=±4.875mV
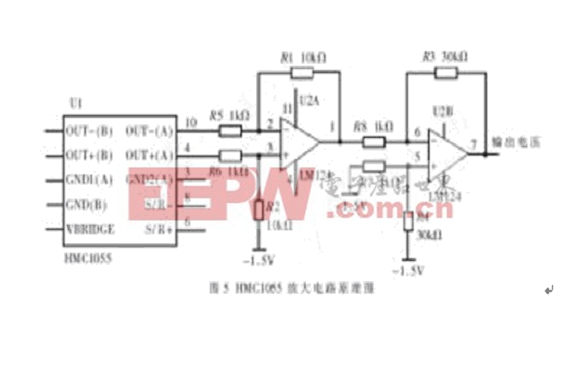
经过上面的分析,使用双运算放大器来设计基本电路,将需要的电压信号放大以进行A/D转换。图5给出了一个HMC1052放大电路的典型方案。由于Vout=±4.875mV,ADC采样在0~3V或者1.5±1.5V范围内,这样就允许运算放大器调整其增益,以将±4.875mV的信号放大至±2.5V的ADC范围内。因此,运算放大器的增益为:
增益=(±1.5V )/(±4.875mV)=307
这里将增益化整取值为300。
b 置位/复位电路的设计
当受到强磁场干扰时,传感器磁化极性会受到破坏,传感器特性也会改变。针对这一破坏性的磁场,需对传感器敏感元件施加一个瞬态的强恢复磁场来恢复或保持传感器特性。在HMC1055系列芯片上有一小电流带,对电流带施加置位或者复位脉冲就能够对传感器置位或者复位 。
置位脉冲和复位脉冲对传感器所起的作用基本是一样,惟一的区别是传感器输出的正负号改变。进行置位或复位,需对复位置位带施加3~4A、20~50ns的脉冲电流,置位或复位脉冲宽度为2μs。
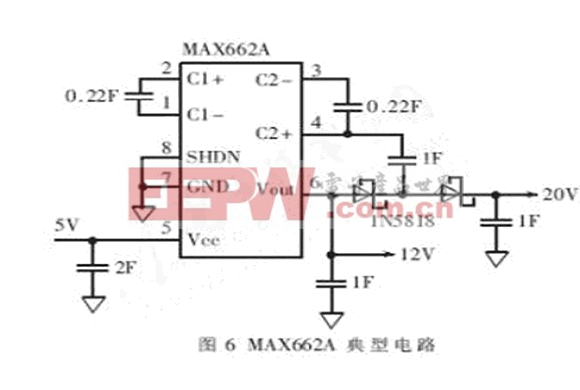
在HMC1055芯片上,置位/复位片的引脚名称是S/R+和S/R-,没有极性的区别,单个置位/复位带标准阻值为2.0Ω,所以对于三轴系统,三个金属片串联阻值为6.0Ω,则产生一个3~4A的最小脉冲驱动一个6Ω的负载所需的供电电压为18V~24V。由于系统芯片都是使用5V电源,所以需要将5V电压升压到20V左右,可以使用MAX662来完成。典型的电路如图6所示。
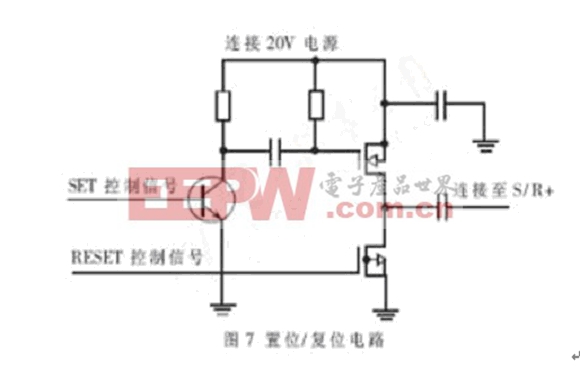
得到需要的电压后,设计图腾柱式置位复位电路,如图7所示。图中SET和RESET可以各连接MCU的一个引脚,当SET为高传感器时置位;RESET为高电传感器时复位。
脉冲宽度会对整个电源的消耗造成直接影响,但是由于汽车内干扰比较多,所以建议至少为2次/秒。这样既可以保证系统的精度,也降低了功耗。
系统的干扰校正
由于汽车内环境的特殊性,造成了车载罗盘周围的干扰比较多,所以设计车载罗盘时需要考虑干扰校正问题。
干扰源可分为硬铁影响(Hard Iron Effects)和软铁影响(Soft Iron Effects)。硬铁影响源于永久磁铁和磁化的钢铁对磁场引起的变化,如车内发动机、直流电等,这种影响恒定地附加一个磁场分量。软铁影响产生于地磁场,受软铁材料的影响,如当汽车驶过一个强磁场区时,这种影响往往是瞬时的,而且比较微弱。所以在设计车载罗盘时主要需考虑硬铁影响对系统的影响[1]。
因为硬铁影响是恒定的,所以可以采用标定的方法消除干扰。标定的方法为:将车载罗盘在水平面旋转一周,记录下X、Y两个方向的最大和最小值(Xmax、Ymax)、(Xmin、Ymin),代入式(4)、(5)、(6)、(7)中,可以得到Xo f f 、Yo f f 。
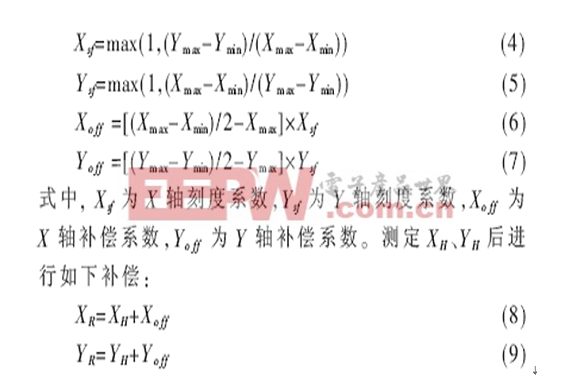
其中,(XR、YR)为经过校正的值,将它们带入式(3)就可以得到方位角。
本电子罗盘的设计充分考虑了汽车内部的不平稳性以及磁场干扰,采用了抗干扰技术,使系统测量精度得到了提高。由于采用了三轴设计和姿态补偿设计方案,使罗盘处于任何姿态时均能正常使用。此外,本系统经过微控制器进行数字输出,从而可集成于GPS定位系统之中。
脉冲点火器相关文章:脉冲点火器原理







评论