
基于CAN总线汽车组合仪表的设计与研究
步进电机(Step motor)是将电脉冲信号转变为角位移e(或线位移S)的开环控制元件,是数字控制系统的一种执行元件。工作原理是建立在被励磁的定子电磁铁吸引可选转的衔铁产生转矩而旋转,即靠磁铁引力作用把电磁能转换成机械角位移。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。脉冲的个数决定了转角的大小,而脉冲的频率决定了电机的转速。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。一般步进电机可分为二相、三相、四相和六相。
本系统步进电机选用深圳伟力驱动有限公司的VID29系列二相汽车仪表步进电机。 vID29-XX/VID29~xXp仪表步进电机是一种精密的步进电机,内置减速比180/1的齿轮系,主要应用于车辆的仪表指示盘,也可以用于其他仪器仪表装置中,将数字信号直接准确地转为模拟的显示输出。VID29步进电机需要两路逻辑脉冲信号驱动,其特点如下:
可以工作于3.5V一10V的脉冲下;
输出轴的步距角最小可以达到1/120,最大角速度6000/s,输出转角转动范围为3150。可用分步模式或微步模式驱动。
选用进口优质特种材料和汽车级特殊工程塑料,同时兼顾防火等安全性能;
采用具有最低噪声和超低摩擦效果的特殊齿形,保证了马达的长期运转寿命和性能。
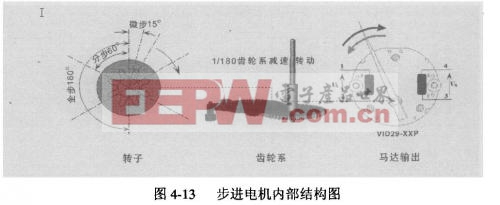
步进电机的分步驱动控制模式:VID29步进电机是经三级齿轮减速转动输出的,驱动要求是用标准的SV逻辑电路电压,可以以分步驱动模式直接驱动马达,电流需求为20mA。在分步模式下,每个脉冲可以驱动马达转子转动600(即输出轴转动1/3度)。电机转动的方向取决于施加在电机左右线圈上的周期性脉冲序列的相位差。如下图所示,左线圈电压UL相位超前于右线圈电压UR时(相位差为/3),VID29一XX系列的电机输出轴将顺时针旋转,VID29一XXP系列的电机输出轴将逆时针旋转。
分步驱动模式脉冲序列如图4一14所示: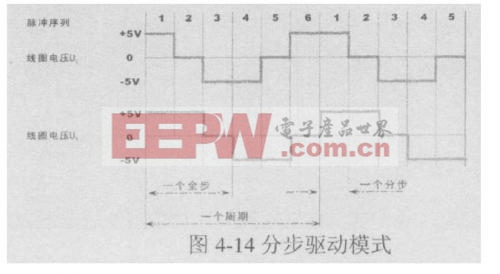
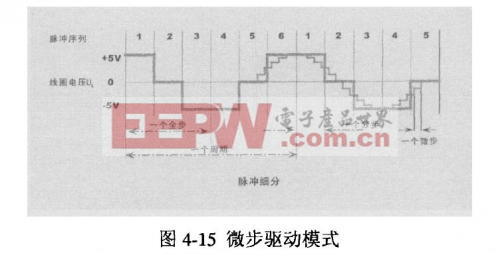
微步驱动模式(细分驱动)脉冲序列如图4-15所示:
它的转速n(或线速度v)与脉冲频率f成正比。步距角越小,指针转动角度越小,仪表显示的精度越高。步距角与脉冲频率的关系可用以下关系式来计算:
φ=180*f/(I*S)
式中φ:步进电机的步距角
f:脉冲频率
I:电机齿轮减速比
S:驱动模式分布数(分步/微步)
步进电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系,而方向由导电顺序决定。
由于H128内部集成了6个步进电机驱动模块,所以无需扩展电路即可实现步进电机与H128硬件接口电路的连接。通过分布驱动模式,每个脉冲可驱动步进电机转动1/3度,满足汽车仪表的精度要求(如需更高精度,可通过扩展微步驱动芯片,使步进电机每个步为1八2度)。步进电机与H128的硬件连接如图4一16:
图中PUO一PU7,PVO一PV7,PWO一PW7直接与H128的输出引脚连接。由于各步进电机直接由H128驱动,所以可以通过修改程序数据输出接口办法改变步进电机布置。
4.8 复位电路及E2PROM设计
单片机系统通常是在一个特定的客观环境下为完成或实现某种功能而设计的,因此系统处于工作状态时,势必会受到各种外界干扰因素的影响。这种外界干扰因素会导致系统内部数据出错,甚至会严重影响程序的运行,使单片机受到干扰失控导致导致程序跑飞或陷入死循环,通过采取一定的软硬件措施使程序脱离死循环或重新运行。
本系统采取了外扩芯片实现的硬件方式,选取xlc0R公司的x5045[sll。集成了看门狗定时器、EZPROM数据存储器、和电源监测为一体,采用SPI的方式与MCU相连,用于低电压复位信号的单片机(H128为低电压复位)。因其体积小、占用UO口少等优点已被广泛应用于工业控制、仪器仪表等领域 。

CS:芯片选择输入端,当CS为低电平时芯片处于工作状态
50:串行数据输出端,在串行时钟的下降沿,数据通过50端移位输出
Sl:串行数据输入端,数据在串行时钟的上升沿锁存
SCK:串行时钟,,为数据读/写提供串行总线定时
WP:写保护输入端,当WP为低电平时,向X5045的写操作被禁止,但器件的其他功能正常。
RESET:复位信号输出端。
x5045除了wTD(看门狗)功能外,另一个重要的基本功能就是作为EZPROM数据存储器使用,内部包含 512xs的串行EZPROM,以保证系统在掉电后仍可维持重要数据不变。x5045与H128采用SPI总线接口连接方式,程序,获得准确的脉冲累计计数,并将此值传送给X5045存储。X5045是理想的自动贮存非易失性SRAM,内部含有EEPROM,存储容量256bit,能够在失去vCc的时候自动执行存储操作 (SRAM—EEPRoM),非常适合对里程的累计记录。芯片内部包含一个指令移位寄存器,该寄存器可以通过SPI来访问。X5045与H128连接的电路如图4一18所示:











评论