
伪码调相连续波雷达接收单元数字化研究
摘 要:为了缩短某类伪码调相正弦调频连续波雷达的探测时间,增加目标的自动识别功能,同时减少其接收单元的体积,用数字信号处理芯片代替了原来的模拟接收部分,并用一路卷积的算法代替了原来的多路相关。后期通过试验证明了此数字化接收系统的探测时间比原系统的接收时间缩短了50 ms,最高的目标识别率达到了75%,能满足实际应用的需求。
关键词:连续渡雷达;数字信号处理;自动识别;探测时间
0 引 言
伪码调相正弦调频连续波雷达是利用伪随机码良好的自相关特性进行测距,同时利用连续波雷达没有盲速盲相的优点进行动目标速度的测量。某一类伪码调相正弦调频雷达用一个中频信号去调制发射信号,对回波进行适当处理得到有距离灵敏度控制特性的目标多普勒信号。在此类雷达中接收单元的数字处理部分是在得到目标的多普勒信号以后,在高频、中频部分都是用模拟电路来实现的,为了提高接收单元的稳定性,减少接收单元的体积,缩短探测时间,同时实现目标的自动识别功能,需要开发出一种从视频回波直接进行数字化处理的接收单元来代替原接收单元,基于此目的,本文介绍一种数字化接收方案以及其硬件和软件设计。
l 数字化接收的原理
1.1 传统的信号处理过程
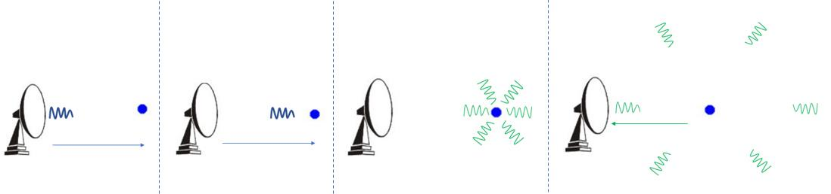
在此类雷达传统的信号处理过程中,视频回波先经过多路相关器的某个支路后得到对应距离单元的回波,然后经过正弦滤波后经同步检波得到具有距离灵敏度控制特性并且包含所需目标信息的多普勒信号,最后用数字处理的方法来判断此距离单元运动目标的速度等信息。当要对另外一个距离单元进行检测时只需要改变输入到相关器中伪码的延迟就可以对这个距离单元进行检测,在实际处理的过程中多个相关支路中所加入的伪码延迟时间是连续变化的,连续改变伪码的延迟就可以完成对所有距离单元的检测。在进行数字化接收设计以前某个距离支路的信号处理过程如图1所示,其他距离支路的处理过程与图1中所描述的完全一样。

1.2 数字化信号处理过程
设计的数字化信号处理流程如图2所示。
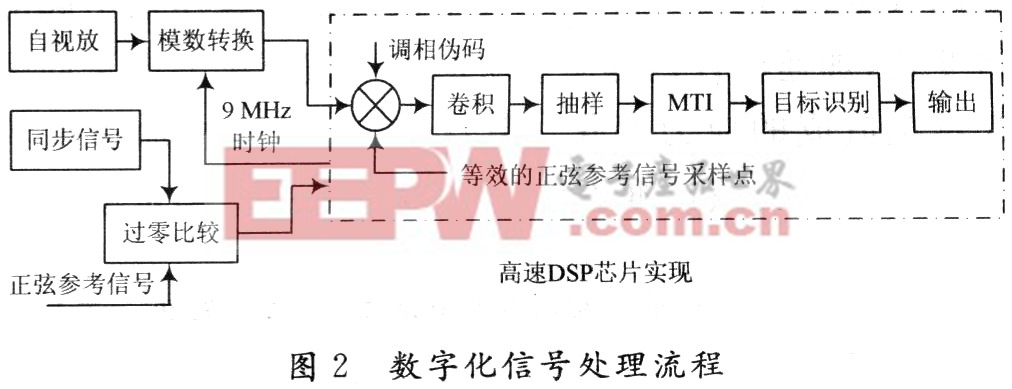
信号处理过程如下:由DSP芯片产生的9 MHz时钟对视频回波进行采样,采集到的数字信号在DSP内乘上调相伪码和等效的参考信号采样点后进行卷积。用一次卷积代替多路相关,卷积输出经过抽样后得到各个距离单元的回波信号,然后对每个距离单元的回波进行MTI(动目标显示)检测,对有动目标的距离单元进行目标识别,然后进行输出提示。
2 硬件实施方案
2.1 主要芯片的选择
2.1.1 DSP芯片的选择
本系统在采集到信号以后所有的算法都是在DSP芯片内部完成的,因此运算量大,要达到实时处理,对DSP芯片的运算速度提出了较高的要求,且处理的数据量大,要求片内有较大存储空间。ADI公司的BLACKFIN系列中BF533的主频可以运行在600 MHz,内部存储数据的SRAM有68 KB,片外可以扩展到128 MB的SDRAM作为外部存储器,此外BF533还有以下三个优势可以提高运算速度:
(1)BF533内部有两个零开销的硬件循环机制,在一次程序执行完成以后可以省去执行条件是否成立的判断过程,直接执行若干次循环以后就执行下边的指令。
(2)BF533内部有两个乘法累加器,两个同时使用相当于在进行乘法运算时使主频达到了1 200 MHz,提高了指令执行速度。
(3)在BF533内部的L1存储区和内核运算单元之间的指令总线宽度是64 b,因此可以并发的同时执行一条32 b的指令和两条16 b的指令,提高了指令的执行速度。
综合考虑以上因素确定用ADI公司生产的BLACKFIN系列的BF533作为整个系统的DSP芯片。










评论