
基于CP-132UL V2的IMU地面测试软件设计
针对IMU的野外测试环境限制,需改进其测试方法,则需用新的硬件采集电路实现。根据实际需要,在CP-132ULV2数据采集板的基础上,采用VC6.0设计了针对野外测试环境所需的测试软件,从而实现在恶劣环境下完成对IMU的标定工作。
2 CP-132UL V2简介
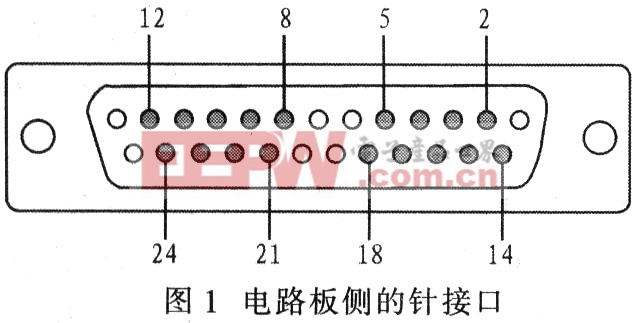
CP一132UL V2是Moxa公司生产的工业级多串口采集板,可信赖的信息传输最远可达4 000英尺,最大波特率为92 160 b/s,使其传输RS一422/485的信息传输像RS一232一样简单。基于CP一132UL V2的自动数据传输控制的特点可为数据通道的开启和关闭提供精确的时间控制,即使在高速数据传输下,也不会产生故障。将该器件置于电路板中的终端电阻器,为电阻器提供合适的阻值。绝缘保护方案可使电路板能够承受2 000 V的高压。下面给出CP-132UL V2的接口针分配图,其中图1是电路板和计算机的接口,25针结构,可以直接插入工控机的主板插槽,表1为其各针接口功能;图2是与设备连接的接口,9针结构,连接需要测量的信号发生器,表2为其各针接口功能。

3 标定测试方法
IMU的核心部件是陀螺和加速度计,由于陀螺和加速度计自身的标度因数和安装误差因素的影响,使得IMU输出存在较大误差,所以需要标定IMU实现输出补偿。

采用分立标定方法标定惯组的误差参数,所谓分立标定方法就是直接利用加速度计和陀螺的输出作为观测量,与已知基准信息相比较从而确定误差参数。标定测试主要包括:①加速度计误差参数的标定;②陀螺标度因数以及安装误差系数的标定;③陀螺常值漂移的标定;④标定结果评估。
4 标定软件设计
基于CP-132UL V2的标定测试软件主要包括RS-422串行通讯,静漂测试和标定测试等功能模块。
4.1 RS-422串行通讯
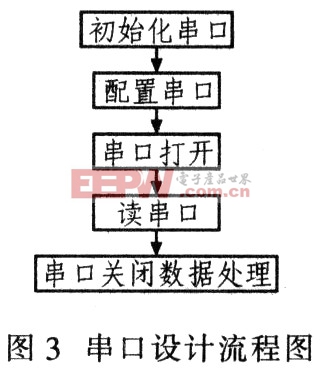
地面测试设备通过RS-422串行总线与惯组通讯,主要完成惯组数据接收和惯组误差补偿参数写入,其波特率为921.6 Kb/s。而数据包括帧计数、3路陀螺数据及温度3路加表数据及温度,以及温度控制板温度。惯组的数据每隔10 ms发送一组数据。利用API函数实现对RS一422串口通信的访问,在实现控制通信中,主要调用3个函数实现串口控制:首先配置串口,串口打开,然后通过对串口操作,接收数据后,关闭串口。程序设计流程如图3所示。设计时,串口设计是针对CP-132UL V2采集板,由于采集板内部可自动分配地址,所以不需要对硬件做任何操作,只需在软件上编写串口功能即可实现串口通讯。
4.2 静漂测试
静漂测试主要是对惯组进行一次通电稳定性测试。测试数据采样周期T、测试数据组数N可预先设定,最后计算静漂测试数据平均值和随机误差,评估惯组稳定性。
设计时,需要注意的是采样周期和测试组数可任意设定,所以要将采样周期和测试组数设为全局变量,计算平均值和随机误差时,只需将前面采集的数值进行简单算法。
4.3 标定测试











评论