
基于线阵CCD扫描的测量技术
0 引言
在基于机器视觉的零件二维尺寸测量通常采用面阵CCD相机作为图像采集设备,由于面阵CCD相机的像素分辨率较低。使得在测量精度要求较高的场合很难完成测量任务。线阵CCD器件具有空间分辨率高的特点,可以实现高精度测量。近年来,利用线阵CCD进行无接触一维测量已经得到广泛应用。本文提出采用线阵CCD相机对零件进行平行扫描采集零件图像,实现零件二维尺寸的高精度测量。
1 线阵CCD扫描测量原理
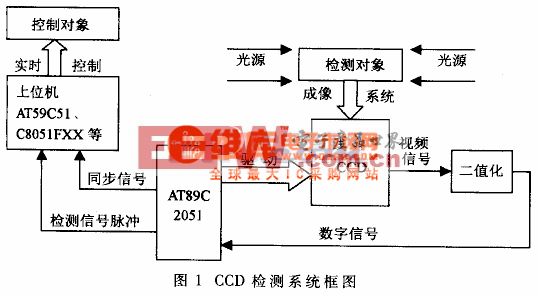
线阵CCD扫描测量系统主要由线阵CCD相机、运动工作台、控制电路及线光源等组成,扫描测量原理如图1所示。
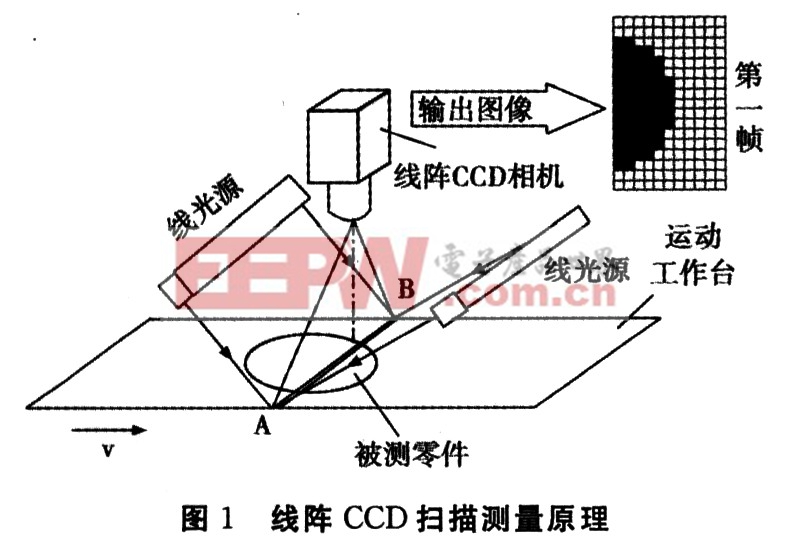
被测零件放置于运动工作台上,随工作台一起以速度v向右方行进,零件未进入相机视场AB时,线光源所发射光线直接通过光学成像系统成为一帧灰度值较高的背景图像,当零件进入相机视场时,零件遮挡光线使得采集图像含有零件轮廓信息,将所有输出图像按采集的先后关系进行拼接,即可得到完整的高分辨率零件图像,通过图像处理得到零件的二维几何尺寸。
2 扫描同步控制
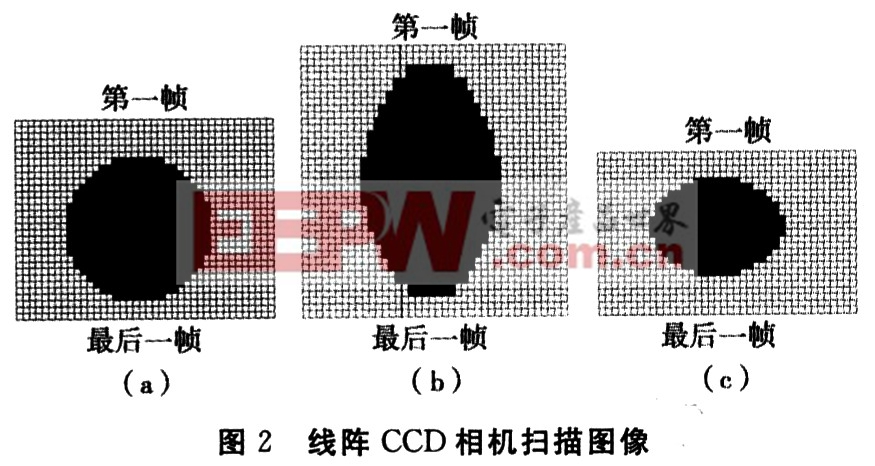
扫描同步控制是线阵CCD扫描测量零件二维几何尺寸的关键技术,也是影响系统测量精度的最主要因素。所谓扫描同步是指:单位时间内线阵CCD相机所采集图像总和对应的物方实际尺寸与零件的行进速度相同。当扫描同步时,获取的零件图像与实际零件相比没有发生变形,如图2(a)所示,对其进行处理的结果最接近零件尺寸的真实值;当相机采集速度大于零件行进速度时,零件图像被拉长,如图2(b)所示,对其进行处理的结果将大于零件尺寸的真实值;当相机采集速度小于零件行进速度时,零件图像被压缩,如图2(c)所示。对其进行处理的结果小于零件尺寸的真实值。
为保证对零件尺寸测量的准确性,需要进行同步控制。线阵CCD的像素尺寸S为14μm×14 μm,线扫描速度vx为500帧/秒,镜头焦距f为50 mm,镜头到零件的距离D为150 mm,则CCD像素所对应的物方尺寸L为:

则单位时间内线阵CCD相机所采集图像总和对应的物方实际尺寸(即CCD相机扫描图像速度v)为:
![]()
在这种情况下,要实现零件扫描同步则要求零件的行进速度为21 mm/s。





评论