
自触发脉冲激光测距飞行时间测量研究
摘要:提出一种新型脉冲激光测距方法——自触发脉冲飞行时间激光测距方法。运用该方法有效解决了传统脉冲激光测距法中存在的提高测量精度和缩短测量时间两者之间的矛盾。对该方法及本质特点进行了详细描述和理论分析,并给出用于描述该方法的基本方程。其飞行时间测量系统的设计很大程度上决定了自触发脉冲激光测距的测量精度和测量速度。设计并实现了基于CPLD的自触发脉冲激光测距飞行时间测量系统。CPLD的使用提高了测量精度,并且结构简单,体积小,可靠性高,非常适合高性能便携式的激光测距仪。
关键词:脉冲激光测距;自触发;CPLD;飞行时间测量;精度
相对于相位式激光测距等连续波测距方法,脉冲激光测距结构简单,测程远,测量速度快,因而得到广泛的应用。但是脉冲激光测距的缺点在于单脉冲测量精度不高,目前,单脉冲激光测距精度在实际应用中只能达到厘米量级,难以达到毫米量级。要达到更高的测量精度,只能通过对多次单脉冲激光测距结果求平均值的方法来获取,但是这样就会增加测量所需要的时间,降低了测量速度,不仅不便于使用,也限制了其应用的范围。
为了更好的解决脉冲激光测距测量精度与测量速度之间的矛盾,提出一种新型的脉冲激光测距方法,自触发脉冲激光测距法。自触发脉冲测距方法,可以有效克服激光测距中存在的提高测距精度和缩短测量时间两者的矛盾。该方法比起传统脉冲重复频率方法具有更高的测量精度和更快的测量速度,并且有效摆脱了时间间隔测量能力对测距精度的根本限制。自触发脉冲飞行时间激光测距是利用激光接收单元的输出信号自行控制激光发射单元,进而触发激光脉冲向测距目标发射,即激光接收单元接收到激光脉冲之后,去触发激光发射单元产生下一个激光脉冲。激光脉冲的发射和接收先后衔接,自动循环,从而得到一个周期信号ST。测量该信号的周期就可以得到激光脉冲的飞行时间,从而可计算出距离,由统计理论,测量激光脉冲Ⅳ次往返的飞行时间(N个周期),可比测量1次往返的时间精度提高N倍。与传统脉冲激光测距的取N次独立测量的平均值相比,精度提高更大,并且只要进行一次数据读取存储,节省了N-1次数据读取存储时间。这样,自触发脉冲激光测距就可以在同样的测量时间下,达到更高的测距精度,或者达到同样的测量精度的同时却有更快的测量速度,从而有效的克服了传统激光测距方法中存在的提高测距精度和缩短测量时间两者之间的矛盾,有利于实现高速高精度测距。
自触发脉冲激光测距的测量精度在较大程度上要取决于激光飞行时间的测量精度,要获得较高的测量精度,就必须设计较高的飞行时间测量系统。文中采用CPLD(Complexprogrammable logic devices)研制出自触发脉冲激光测距的飞行时间测量系统,可以达到较高的测量精度。
1 自触发脉冲激光测距原理及脉冲时序逻辑
脉冲激光测距的基本单元包括激光发射单元,激光接收单元和飞行时间测量单元。在传统的脉冲激光测距中,测距原理是基于测量发射的激光脉冲(START)和接收单元接收到的返回激光脉冲(STOP)之间的时间间隔△T。目标距离D由下式给出
![]()
其中C为光速,时间间隔△T由飞行时间测量单元测量给出。
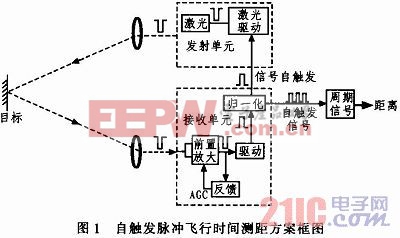
自触发脉冲激光测距方案如图1所示。利用激光接收单元的输出信号自行控制激光发射单元,进而触发激光脉冲向目标发射,即激光接收单元接收到激光脉冲之后,去触发激光发射单元产生下一个激光脉冲。





评论