
AT89C52单片机在捻度测量中的应用
纱线捻度测量是纺织生产中重要的环节。目前纱线捻度普遍采用机械式和半电子化测量。该测量方法精度低、操作人员劳动强度大、易出现错误操作。为适应市场需求和社会发展,开发了以单片机为核心捻度测量装置,实现捻度测量的自动化、微型化、数字化,从而大大提高了测试精度。
本文引用地址:http://www.amcfsurvey.com/article/193496.htm1 系统原理
本装置如图所1示。单片机将测量的电机转速与键盘设置的工作方式和初始值进行比较判断,调整输出脉冲的高电平,控制直流电机的速度和启动停止。同时将单片机计算的电机转速和旋转数(捻数)通过串行方式输出显示。

2 系统的硬件组成
系统的硬件基本上分为三个部分:即PWM脉冲转换电路、速度测量电路和单片机电路组成。
1)速度测量电路
本装置中电机的转速比较低,采用霍尔元件作为传感器。将磁芯固定在电机的转子上,感应部分固定在电机外壳。当转子旋转,磁芯接近或远离感应器,不同的磁感应强度使感应器产生微小的电压差。差分放大器将电压差放大后送给施密特触发器整形为脉冲信号,经过三极管驱动取反后作为单片机INT1的中断源。电路如图2所示。
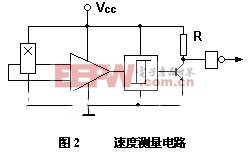
T1定时/计数器设为定时方式,与软件配合组成脉冲周期测量。外部中断INT1产生时,单片机读取两次中断之间的时间,计算成速度和捻度输出显示。
2)PWM脉冲转换电路
PWM控制系统是通过改变直流电机电枢上脉动直流电的“占空比”来改变平均电压的大小,从而控制电机的转速。电枢电压的平均值为:Umg= .Vcc=ρVcc, ρ= 称为占空比,其值由固定频率调节脉冲宽度的方法来调节。本装置采用H型单极受控可逆式PWM的功率转换电路,如图3所示。
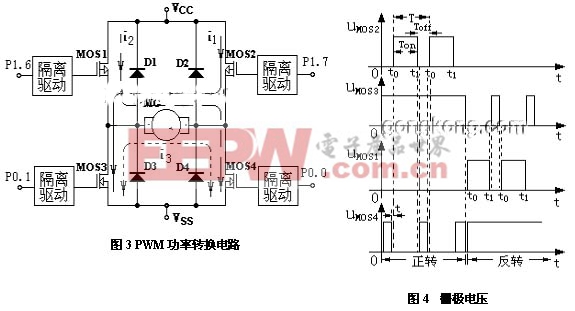
它由四个大功率的场效应管和四个续流二极管组成。四个大功率的场效应管分为两组,MOS1和MOS4为一组,
MOS2和MOS3为一组。当MOS2、MOS3导通,MOS1、MOS4关断,电枢电压Umg=Vcc,电枢电流img沿方向1流通,电动机正转;当MOS1、MOS4导通,MOS2、MOS3关断,电枢电压Umg=-Vcc,电枢电流img沿方向2流通,电动机反转;当MOS1、MOS2关断,MOS3、MOS4导通,Vmg=0,电枢电流img按原先方向沿3构成续流回路。图3中场效应管输入端分别与单片机的P1.6、P1.7、P0.0和P0.1连接;为了更好的续流,获得较大的转距,应在场效应管栅极加入如图4所示的电压波形。图4所示的栅极电压波形由软件产生,控制电机的启停、转动方向和转速。
3)单片机和键盘显示电路
本装置采用AT89C52单片机,其性能价格比高,内部具有3个16位定时/计数器、一个串行口、8K FLASH存储器和256个字节的RAM及两个外部中断源,32个I/O线,完全满足系统的要求。根据系统要求,设计出如图5所示的电路,为了提高装置的可靠性,通过光藕将PWM功率转换电路和单片机键盘显示电路隔离,并采用两组电源供电。为防止死机现象,外加了定时看门狗(WATCHDOG),在程序出现“死机”或“飞逸”时,系统能够自动进行复位;同时定时看门狗内部的存储器用来存储键盘设置的工作方式和其他的基准值。
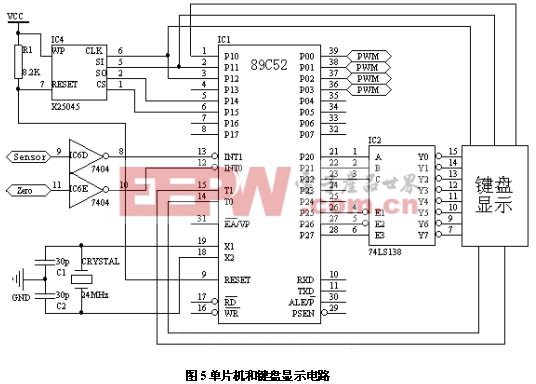
因为直流电机转速都比较低,用两个4位LED就可以满足显示的要求。显示采用动态工作方式,P1.0、P1.1和P1.3作为显示端口,外接两片CD4094进行捻度和速度七段码的串并转换,经过两片2003驱动送给数码显示器和状态指示灯。P3.4和P3.5为键盘数据输入端,P2口连接74LS138作为键盘和显示器的扫描端口。
3 系统的软件设计
软件是配合硬件完成脉冲计数、速度与捻度显示、键盘处理和转速控制。主程序完成键盘处理,速度、捻度及状态显示。在外部中断子程序中读取定时/计数器T1和相关变量的值计算当前电机转速,按一定算法调整PWM信号高电平宽度,同时根据设定的工作方式计算纱线捻数。在本装置中关键是如何产生如图4所示的PWM电压波形,以确保电路和电机正常工作。
.
定时/计数器T2和T0用作PWM信号的产生,T2决定工作脉冲的基准周期T,T0控制工作脉冲高电平的宽度Ton,低电平宽度Toff为T2定时减去T0定时。图3中跨接在直流电源Vcc两端的上下两个场效应管交替工作,由于场效应管不能立即关断,因此,当一个场效应管关断后,另一个场效应开启之前必须延时一段时间,以避免上下两个场效应直通,造成短路。故对于图4所示波形,在续流和方向改变的两个场效应管交替时,通过软件定时延时t时刻。软件代码如下:
;T2中断服务子程序
;T2工作于16位常数自动重新装入方式,决定PWM工作周期
T2_INT:JB DIRECT_FLAG,T2_BACK ;判断正反转
CLR P1.7 ;无反转输出
CLR P0.1
NOP
NOP
SETB P1.6 ;正转输出高电平
SETB P0.0
SJMP T2_QUIT
T2_BACK:CLR P1.6
CLR P0.0
NOP
NOP
SETB P1.7
SETB P0.1
;T0置初值,启动
T2_QUIT: MOV TH0, SPEEDRAMH ;T0初值由预置速度和实际测量
MOV TL0,SPEEDRAML ;速度比较后决定
SETB TR0
SETB ET0
RETI
;定时/计数器T0中断服务子程序
;T0工作于方式1,决定PWM信号的高电平
T0_INT: JB DIRECT_FLAG,T0_BACK
CLR P1.6 ;正转输出低电平
NOP
NOP
SETB P0.1 ;更好的续流,获得较大转距
SJMP T0_QUIT
T0_BACK:CLR P1.7
NOP
NOP
SETB P0.0
T0_QUIT:CLR TR0
RETI
4 结论
本装置的硬件电路体积小、功耗低,抗干扰能力强,具有较好的稳定性和可靠性。采用结构化的软件设计方法;用平滑滤波算法解决速度测量的干扰问题
,实现速度平稳调节;用PWM实现较宽范围的直流调速;采用冗余技术保证系统长时间正常运行。经用户投产运行表明,操作方便,经济效益显著,具有较强的市场竞争力。


评论