
FPGA多接口功能在航姿计算机中的应用
引言
捷联惯导中的航姿计算机实现数字平台导航,需要在复杂运算的同时还能够高速、准确地完成多种传感器测量数据的采集以及航姿结果和系统状态的传送。通常的做法都是用一片或多片 DSP芯片来完成,但是当数据接口较多而且数据传输频率较高时,这类系统的实时性就难以得到保证;而 FGPA具有丰富的硬件资源,能够真正实现多模块并行工作,而且可以达到较高的工作频率。另外,用 FPGA 设计航姿计算机,还具有以下突出的优点:低成本、低功耗、小体积、可重新编程、升级方便、VHDL 设计电路可复用等。本文详细介绍了在接口较多的航姿计算机中,怎样设计 FPGA使得多种通讯接口功能都能实时可靠地实现,具有实际工程意义。
1系统总体设计
图 1为该捷联航姿系统的硬件结构框图。该系统需要高速、实时地采集多种传感器(包括大气传感器、IMU、磁罗盘)的测量数据,以及一些有关的模拟量,用于 DSP中高精度的航姿解算,同时也需要将航姿信息和系统信息发往多个设备(包括飞参记录仪、显示仪表和DS)发送。采集数据需要同时用到的接口包括ARINC429、RS422、SPI、与 DSP并行接口等多种接口;如此多数量、多种类的接口的完成还必须保证准确性和实时性。这整个系统的时序、逻辑控制都是由 FPGA完成的,DSP(选用 TI公司的TMS320C6713)作为从处理器专门用于航姿解算。本系统中选用的 FPGA芯片为 ACTEL公司 PA系列中的 APA300芯片,用 VHDL语言在 LibroIDE环境下对该芯片进行开发。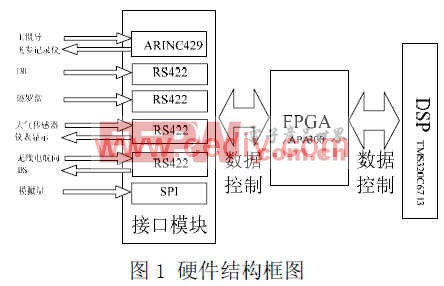
2多种工业接口的 FPGA实现
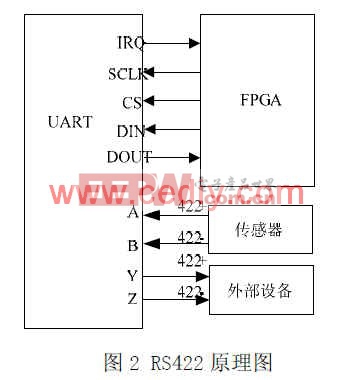
(1)RS422通讯接口。RS422标准是利用差分传输方式提高通信距离和可靠性的一种通信标准。该航姿计算机需要用 RS422接口与IMU、大气传感器、磁罗盘、无线电航表等六个外部设备通讯。由于 RS422可以支持双工工作模式,为了充分利用资源,因此设计了四个完全相同的并行的接口模块,其中每一个接口模块都是通过 FPAG控制 MAX3140芯片得以实现(如图2);同时出于设计效率的考虑,只设计了一个通用的实体,而让每一个控制模块都作为该实体的一个实例。这样,虽然这四个模块的结构完全相同,但是在顶层实体中施加不同的控制,就实现了两个单工和两个双工的工作模式。该通用的实体按照 MAX3140的工作时序图,通过控制和监测 UART的五个管脚(SCLK数据接收时钟、CS片选信号、DIN控制数据输入、IRQ中断、DOUT数据输出),完成对芯片的上电自检和对信号的接收发送;顶层实体并行地控制四个实体的工作,从而互不影响地实现了上述多路信号的接收和发送。









评论