
基于FPGA的太阳跟踪器的设计及实现
0 引言
太阳能是一种清洁无污染的能源,取之不尽,用之不竭,发展前景广阔。但是太阳能具有间歇性及强度和方向不确定的特点,给太阳能的收集带来了一定困难。采用太阳跟踪装置可以使太阳光线始终与接收面保持垂直,提高太阳能设备的能量接收效率,从而提高太阳能利用率。
本设计采用传统的视日运动跟踪法,利用Xilinx公司提供的FPGA开发环境ISE,设计完成了基于XC3S1500开发板的太阳能自动跟踪系统,以实现对太阳的全天候、全自动、实时精确控制。
1 视日运动跟踪法
视日运动跟踪法是根据地日运行轨迹,采用赤道坐标系或地平坐标系描述太阳相对地球的位置。一般在双轴跟踪中极轴式跟踪采用赤道坐标系,高度角-方位角式跟踪采用地平坐标系。
1.1 极轴式跟踪
赤道坐标系是人在地球以外的宇宙空间里,观测太阳相对于地球的位置。这时太阳位置是相对于赤道平面而言,用赤纬角和时角这两个坐标表示。太阳中心与地球中心的连线,即太阳光线在地球表面直射点与地球中心的连线与在赤道平面上的投影的夹角称为太阳赤纬角。它描述地球以一定的倾斜度绕太阳公转而引起二者相对位置的变化。一年中,太阳光线在地球表面上的垂直照射点的位置在南回归线、赤道和北回归线之间往复运动,使该直射点与地心连线在赤道面上的夹角也随之重复变化。赤纬角在一年中的变化用式(1)计算:
![]()
式中:δ为一年中第n天的赤纬角,单位:(°);n为一年中的日期序号,单位:日。
时角是描述地球自转而引起的日地相对位置的变化。地球自转一周为360°,对应的时间为24 h,故每小时对应的时角为15°。日出、日落时间的时角最大,正午时角为零。计算公式如下:
![]()
式中:ω为时角,单位:(°);T为当地时间,单位:h。
根据上述方法可以计算出地球上任意地点和时刻的太阳的赤纬角和时角,由此可建立极轴式跟踪,对于太阳跟踪系统来说,采光板的一轴与地球自转轴相平行,称为极轴,另外一轴与其垂直。工作时采光板绕地球自转轴旋转,其转速的设定为与地球的自转速度相同,方向相反。为了适应太阳赤纬角的变化,采光板围绕与地球自转轴垂直的轴做俯仰运动。此种跟踪方式原理简单,但是由于采光板的重量不通过极轴轴线,极轴支撑结构的设计比较困难,因此本设计没有选用极轴式跟踪。
1.2 地平坐标系
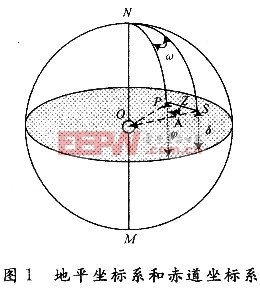
地平坐标系用高度角和方位角来描述太阳的位置,已知太阳赤道坐标系中的赤纬角和时角,可以通过球面三角形的变换关系得到地平坐标系的太阳的高度角和方位角。如图1所示,该天球是以观测者为球心,任意距离为半径的假想球,对于天球上各点之间的距离,只讨论它们之间的角距而不考虑它们的线长。M和N分别为天球上的南北天极。P点为观测者的铅垂线与天球的交点,P点的地理纬度为φ,S为太阳在天球中的位置。S的赤纬度为δ,观测者的铅垂线OP与地心与太阳连线的夹角叫做天顶角,天顶角和太阳的高度角互补。角A为太阳的方位角。












评论