
基于CMAC神经网络的PID参数自整定方法的研究
0引言
本文引用地址:http://www.amcfsurvey.com/article/188490.htm控制器的参数整定是通过对PID控制器参数(KP,KI,KD)的调整,使得系统的过渡过程达到满意的质量指标要求。PID参数的整定一般需要经验丰富的工程技术人员来完成,既耗时又耗力,加之实际系统千差万别,又有滞后非线性等因素,使PID参数的整定有一定的难度,致使许多PID控制器没能整定的很好;这样的系统自然无法工作在令人满意的状态,为此人们提出了自整定PID控制器。将过程动态性能的确定和PID控制器参数的计算方法结合起来就可实现PID控制器的自整定[1,2]。
笔者设计出一种基于CMAC小脑模型神经网络的PID参数自整定的控制系统,从而实现PID参数的快速整定,并且使得PID的参数整定达到一定的精度。
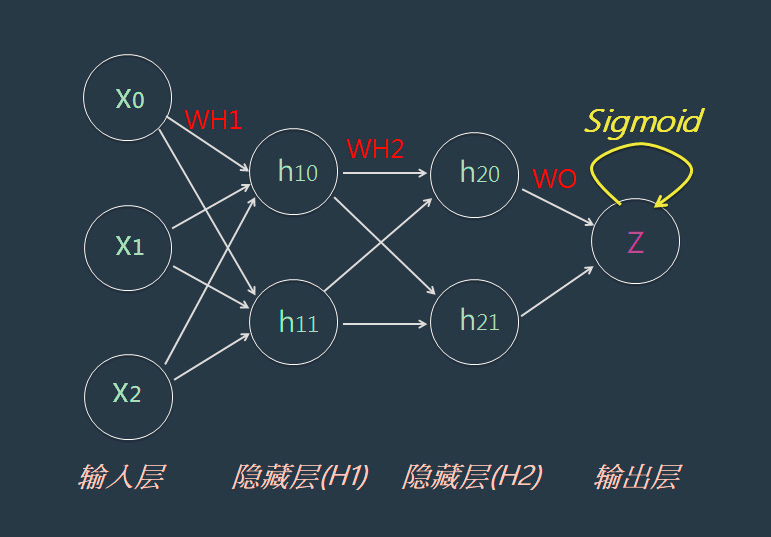
CMAC(Cerebellarmodelarticulationcontroller)是J.S.Albus在1975年提出的一种模拟小脑功能的神经网络模型。CMAC是一种联想网络,对每一输出只有小部分神经元(由输入决定)与之相关,它的联想具有局部泛化能力,即相似的输入将产生相似的输出,而远离的输入产生几乎独立的输出。CMAC与感知器比较相似,虽然从每个神经元看其关系是一种线性关系,但从结果总体看,它适合一种非线性的映射,因而可以把CMAC看作一个用于表达非线性映射(函数)的表格系统[3]。由于它的自适应调节(学习)是在线性映射部分,所以其学习算法是简单的算法,收敛速度比BP快得多,且不存在局部极小问题[4]。CMAC神经网络结构如图1所示。
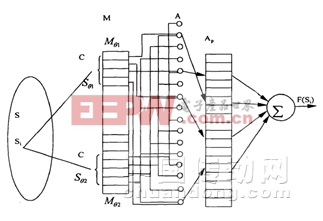
图1CMAC结构
2系统原理
系统的工作原理为:当闭环控制系统受到扰动时,对系统误差的时间特性进行模式识别,首先得出系统误差曲线的峰值及时间,如图2所示。
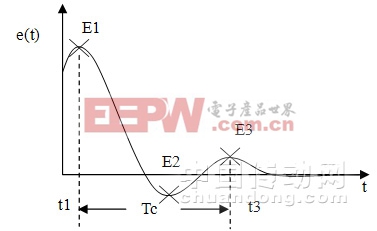
图2给定值阶跃变化时的误差e(t)曲线
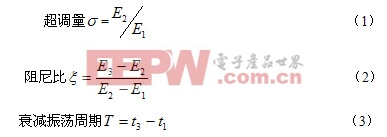
再根据以下公式得出该过程响应曲线的多个特征参数ei(i=1,2,3)分别为:超调量σ,阻尼比ζ和衰减振荡周期T。
将识别出的三个特征参数作为输入送入CMAC参数整定网络,经计算后得出相应的PID参数的变化量( ),再将所得参数送入PID控制器,从而实现PID参数的自整定。PID参数自整定系统如图3所示。
),再将所得参数送入PID控制器,从而实现PID参数的自整定。PID参数自整定系统如图3所示。
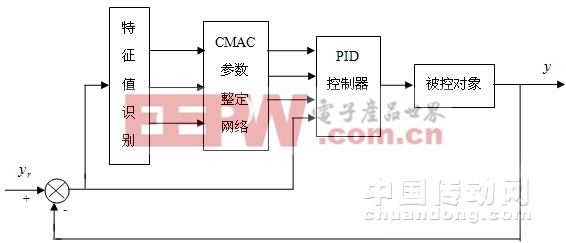
图3PID参数自整定控制系统
在本CMAC神经网络中,获取系统误差特性曲线中的三个特征参数,每个特征参数根据表的划分,成为一个特征参数等级。当每个区域的特征参数大小都确定时,就组成了一个特征参数模式。当获取的特征值发生变化时,相应的模式也发生变化。因而本文建立的CMAC网络的输入是一个3个分量组成的向量,即选取的三个特征值(阻尼比,超调量百分比,衰减振荡周期)也可称为特征参数模式。由于PID控制器需整定的参数为3个,所以,CMAC网络的输出为3个分量组成的向量。每一个元素与PID控制器中的一个待整定参数相对应。

pid控制器相关文章:pid控制器原理






评论