
DSP在六自由度电磁跟踪系统中的应用
摘 要:针对目前电磁跟踪系统跟踪速度慢,计算参数精度低的现况,文中介绍了一种采用DSP系统来完 成对感应天线接收到的模拟信号采集处理的方案。该方案实现了单通道128 kHz的采样率和12位的数据精度,解 决了系统中信号的时序配合问题,很准确地得到了系统的接收矩阵,提高了系统的定位精度,并将数据刷新率提高 到125 Hz。
本文引用地址:http://www.amcfsurvey.com/article/187489.htm六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位 置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的关键所在。在 一些早期的产品中对感应天线接收信号的处理主要采用模拟电路和单片机来完成,由于模拟电路精度低,受 器件性能影响大,单片机的指令执行速度慢,使整个系统无法准确实时地确定目标的位置。本文提出的DSP 数据采集系统利用了DSP快速的指令执行周期和强大的数字信号处理功能和CPLD灵活的时序和逻辑控 制功能,快速准确地完成了对每一路接收信号的采集和计算,得到了准确的数字接收矩阵,为进一步计算目 标的六个自由度参数打下良好基础。本文主要介绍了DSP数据采集系统的硬件设计方案和软件设计流程。
1 电磁跟踪系统的工作原理
六自由度电磁跟踪系统的发射和接收天线均为三维正交环形天线。发射电路向发射天线的xyz轴按时
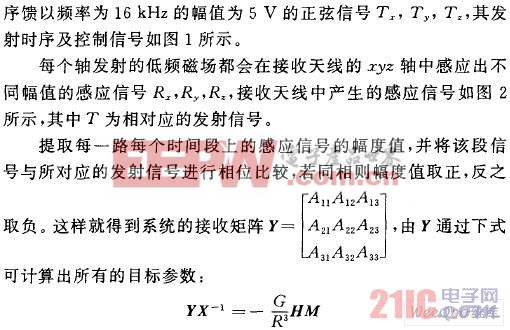
式中x为发射矩阵,为一单位对角阵,G为系统总增益,H、M为包含了接收天线相对于发射天线的位置和接收天线姿态角度的坐标变换矩阵。因此接收矩阵是影响目标参数精度的关键。














评论