
稳定系统中的惯性MEMS的频率响应分析方案
稳定系统简介
本文引用地址:http://www.amcfsurvey.com/article/185634.htm无人飞行器安装的监控设备、海上微波接收机、车辆安装的红外成像系统传感器以及其他仪器系统都需要具有稳定的平台,以达到最佳性能,但它们通常在可能遇到振动和其他类型不良运动的应用中使用。振动和正常车辆运动会导致通信中断、图像模糊以及其他很多行为,从而降低仪器的性能和执行所需功能的能力。平台稳定系统采用闭环控制系统,以主动消除此类运动,从而保证达到这些仪器的重要性能目标。图1是平台稳定系统的整体框图,它使用伺服电机来校正角向运动。反馈传感器为仪器平台提供动态方位信息。反馈控制器处理这些信息,并将其转换为伺服电机的校正控制信号。
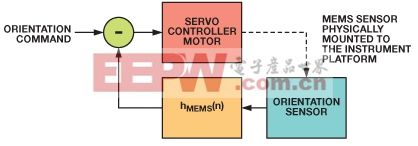
图1. 基本平台稳定系统。
由于很多稳定系统需要多个轴向的主动校正,因此惯性测量单元(IMU)通常包括至少三个轴向的陀螺仪(测量角速度)和三个轴向的加速度计(测量加速度和角定向)来提供反馈检测功能。反馈传感器的最终目标是提供平台定向的精确测量,即使当平台正在运动时也要做到。由于没有万能传感器技术能够在任何条件下提供精确的角度测量,因此平台稳定系统中的IMU通常在每个轴上使用两种或三种传感器类型。
加速度计响应每个轴向上的静态和动态加速。静态加速度似乎是一个陌生的词汇,但它涉及重要的传感器行为:对重力的响应。假定不存在动态加速,并通过校准消除了传感器误差,则每个加速度计输出将代表它的相对于重力的轴定向。为了确定在存在振动和快速加速的情况下稳定系统中通常出现的实际平均定向,通常会将滤波器和融合程序(组合来自多个传感器类型的读数,得出最佳估计值)应用于原始测量
另一种类型的传感器是陀螺仪,它提供角速率测量。陀螺仪测量通过有限周期内的角速率的积分,在角度测量中发挥作用。执行积分时,偏置误差将导致成比例的角度漂移,随时间累加。因此,陀螺仪性能通常与设备偏置对不同环境因素的灵敏度相关,这些因素包括温度变化、电源变化、离轴旋转和线性加速度(线性g和整流g × g)。校准的高质量陀螺仪,具有对线性加速度的高抑制,使这些设备能够提供宽带角信息,作为对加速度计提供的低频信息的补充。
第三种类型的传感器是3轴磁力计,它可以测量磁场强度。从三个正交轴的磁场测量实现了相对于地球磁场本地方向的定向角估算。当磁力计接近电机、显示器和其他动态磁场干扰源时,管理其精度可能非常困难,但在适当情况下,它的角度数据可作为来自加速度计和陀螺仪的数据的补充。虽然很多系统仅使用加速度计和陀螺仪,但磁力计可以改进某些系统的测量精度。
图2的整体框图显示了如何使用陀螺仪和加速度计测量,既利用它们的基本优势,同时又最大程度减少它们的弱点产生的影响。低通加速度计和高通陀螺仪滤波器的极点位置通常取决于应用,另外精度目标、相位延迟、振动和正常运动预测都会对位置决定产生影响。因系统而异的行为也会影响加权因子,而加权因子会对如何组合这两种测量产生影响。扩展卡尔曼滤波器就是一个组合滤波和加权函数以计算动态角度估计的算法的例子。
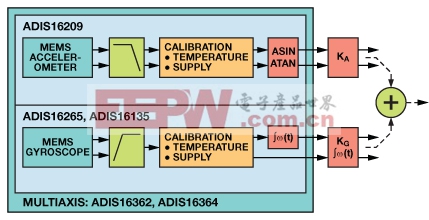
图2. 组合单轴传感器输出。
围绕新的MEMS IMU开发稳定系统时,在系统设计早期阶段了解频率响应是非常重要的,因为IMU的频率响应将对控制器设计产生直接影响,可以帮助识别潜在稳定性问题-特别是在考虑到新一代设计的高带宽解决方案时。这些信息对于预测陀螺仪的振动响应也非常有用。
评估IMU带宽的一种策略是确定哪些信息在产品文档中提供,分析此类信息对系统的惯性运动响应的影响,并稳定系统的响应。此类分析以及它涉及的所有校正操作将成为初始测试的基础。
率响应在IMU和陀螺仪的规格表中表示为带宽.作为一个性能参数,它表示某个频率,输出信号幅度在该频率下降低到传感器遇到的实际运动幅度的大约70% (–3 dB)。某些情况下,带宽可也定义为输出响应落后于实际运动90度时的频率(对于双极系统)。这两个指标可以直接影响控制环路的一个重要稳定准则:单位增益、相位裕量-环路响应的实际相位角度和–180°之间的差值,环路增益为1.了解反馈传感器的频率响应,是优化稳定性保证和系统响应之间的平衡的关键因素。除了管理稳定性标准之外,频率响应还会对振动抑制和制定采样策略产生直接影响,通过这些策略可以测量惯性平台上的所有关键瞬态信息。
要分析系统中的频率响应,首先要从一个高层次黑盒子视图开始,它描述了系统在整个目标频率范围内对输入的响应。在电子电路中,输入和输出是从一般意义上定义的,例如信号电平(伏特),分析通常包括开发传递函数,使用s域表示和电路-电平关系,例如基尔霍夫的电压和电流定律。对于惯性MEMS系统,输入是IMU遇到的惯性运动,输出通常以数字码表示。s域分析技术固然有很大作用,但要为这种类型的系统开发完整的传递函数,通常还需要采用其他技术,并且考虑到更多问题。
开始分析过程时,首先要了解与传感器信号链相关的所有组件。图3提供了典型函数的整体示意图。信号链从核心传感器元件开始,它将惯性运动转化为代表性的电信号。如果带宽在传感器元件中未受限制,则通常受ADC模块前的信号调理电路中的滤波器限制。信号数字化后,处理器通常应用纠错(校准)公式和数字滤波。第二级的数字滤波器会减小反馈系统在控制程序中使用的带宽和采样速率。所有这些级都可能影响传感器信号的增益和相位,与频率相关。图3提供了一个示例,IMU在混合信号处理系统中具有多个滤波器。该系统可作为一些实用分析技术的示例。
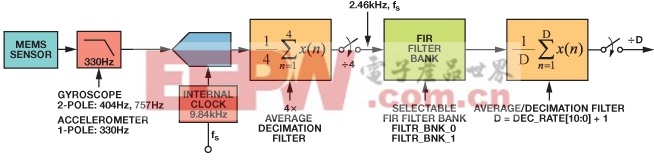
图3. 信号链中用于频率分析的ADIS16488传感器。
核心MEMS传感器元件
要进行此类分析,必须了解可以量化和应该量化的所有行为,然后可对那些无法轻易量化的行为做出合理假设。充分了解已知可变因素之后,通常可以更加简单地重新评估这些假设以进行检查和澄清。ADIS16488 的规格表(图3)显示了330 Hz的–3 dB带宽。假定核心传感器处于临界阻尼状况,而且在远低于其谐振范围(16 kHz至20 kHz)的带宽下并非主要贡献因素。这种情况并非总会出现,但它是一个很好的起点,可以使用噪声密度或完全运动测试,稍后在流程中测试到。
接口电路/模拟滤波器
此外,每个陀螺仪传感器在通过ADC模块之前都会通过双极低通滤波器。这样可以提供足够的信息,以便使用拉普拉斯变换来开发S域中的传递函数表示。第一极(f1)的频率为404 Hz,第二极(f2) 的频率为757 Hz.

加速度计的单极 (f1)传递函数为:
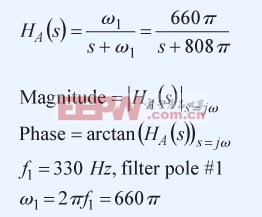
这些公式为程序中的数字分析提供了依据,这些程序可管理与s = jω 恒等式相关的复数。在MATLAB中,以下的m-脚本将生成幅度(比率,无单位)和相位(度)信息:
Fmax = 9840/2; % one-half of the sample rate
for f = 1:Fmax
w(f) = 2*pi*f;
end
p1 = 404; % pole location = 404Hz
p2 = 757; % pole location = 757Hz
NUM1 = 2*pi*p1;
DEN1 = [1 2*pi*p1];
NUM2 = 2*pi*p2;
DEN2 = [1 2*pi*p2];
H1 = tf(NUM1,DEN1); % transfer function for first pole
H2 = tf(NUM2,DEN2); % transfer function for second pole
H488a = H1 * H2; % transfer function for 2-pole filter
[maga,phasea] = bode(H488,w);
for f = 1:Fmax
Mag488a(f) = maga(1,1,f);
Phase488a(f) = phasea(1,1,f);
end

伺服电机相关文章:伺服电机工作原理
加速度计相关文章:加速度计原理 三相异步电动机相关文章:三相异步电动机原理










评论