
电力驱动系统逆变器实时仿真
在交通和某些工业领域中的电力驱动系统的研制过程中,直接使用实际电机系统对新的控制器进行测试,实现起来比较困难,而且费用较高。因此,需要介于离线仿真和实机试验之间的逆变器-交流电机实时仿真器,与实际控制器硬件相连,在闭环条件下对实际控制器进行实时测试。由于这种实时仿真系统回路中有实际控制器硬件介入,因此被称为硬件在回路仿真(Hardware-in-the-Loop Simulation)。
本文引用地址:http://www.amcfsurvey.com/article/178919.htm尽管在真实系统上进行试验是必不可少的,但是由于采用实机难以进行极限与失效测试,而采用实时仿真器可以自由地给定各种测试条件,测试被测控制器的性能,因此实时仿真器可作为快速控制原型(Rapid Control Prototyping)的虚拟试验台,在电机、逆变器、电源和控制器需要同时工作的并行工程中必不可少。
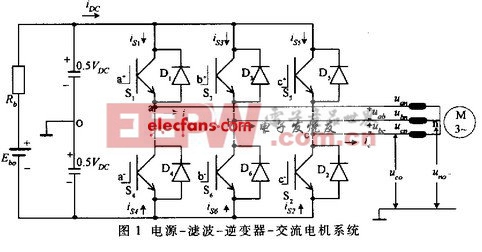
图1 电源-滤波-逆变器-交流电机系统
由于目前数字计算机处理速度的限制,不能实现亚微秒级物理模型实时仿真,需要对逆变器开关过程进行理想化处理,因此引入了离散事件系统。离散事件逆变器子系统与连续时间电机子系统耦合,使变流器-电机实时仿真器成为变因果和变结构系统。变因果是指离散开关事件发生前后,描述连续时间电机子系统的动态方程的输入变量与输出变量会变换位置;变结构是指在仿真进程中,离散开关事件引发状态转换,使连续系统结构发生变化。因而需要对动态方程不断地进行调整和初始化[1]。
框图建模工具Simulink是控制工程仿真的工业标准,但Simulink本质上是一种赋值运算,由其方框图描述的系统是因果的。为了能应用Simulink建模工具,应该使变流器-电机实时仿真系统解耦为两个独立子系统,以消除变因果、变结构问题。
作为功能性建模方法之一的开关函数,可用于确定变流器开关器件电压与电流波形计算,以便进行系统优化设计。它在变流器的离线仿真中已得到成功的应用[2~3]。本文应用文献[2]
的开关函数描述法,采用实际控制器输出的PWM开关逻辑信号定义正、负半桥开关函数,建立逆变器的Simulink模型。该模型既可实现实时仿真系统中逆变器与电机模型的解耦,又可以确定逆变器设置的开关死区时间,防止同一桥臂开关管直通。文中还将给出基于dSPACE实时环境的逆变器-异步电机开控制系统实时仿真的实现方法和结果。

图2 逆变器系统Simulink框图











评论