
锂离子动力电池组的监测系统设计
摘要:动力电池是机器人系统的重要组成部分,本课题主要研究锂离子动力电池组的监测系统,该系统是基于AVR 单片机开发的,可对蓄电池的单体电压、充放电流、温度以及湿度等进行实时监测。要实现电池组参数的集中监测,首先需要设计电池参数的单元采集电路,将电池的电压、电流、温度等数据采集出来,然后输入到带A/D 转换模块的单片机,对数据进行记录和显示。本文对系统的软件和硬件设计进行了详研究和分析。
本文引用地址:http://www.amcfsurvey.com/article/178703.htm1 引言
由锂离子动力电池构成的低压电源,是水下机器人系统中的关键设备。对锂离子电池的维护管理不当将直接影响锂离子电池的使用效益和寿命,甚至直接损坏锂电池,从而影响水下机器人整体性能,严重情况下还会导致机器人的安全事故。通过在线测量锂离子动力电池组的参数,可以及时了解锂离子电池的工作状态、工作特性及锂离子电池需要维护情况,因而锂离子动力电池的在线监测系统的研制势在必行。
为了实现锂离子动力电池参数的监测,首选需要设计参数采集模块,将锂离子动力电池的电压、电流、温度等参数采集出来,同时上传到带有A/D 转换模块的单片机中,对这些数据进行记录和显示。
2 锂离子动力电池组的监测系统概述
本系统采用分散数据采集和集中数据处理,分别设计电压采集电路、电流采集电路、温度采集电路,然后把数据都输送到单片机进行集中处理。系统结构图如图2-1 所示。

图2-1 系统结构图。
本系统监测的对象是国家863 项目水下机器人系统的锂离子动力电池组,用的是深圳雷天科技生产的TS-LFP160AHA 型号的锂离子动力电池,电池组由8 块单体电池组成。需要监测每块单体电池的端电压,并做出过压、欠压判断;需要多点测温度,监测每块电池的温度以及电池组所处环境的温度、湿度;由于8 块单体电池串联,所以只需要测出串联电流,并做出过流判断。
本文采用了TMS320LF2407A 芯片。采用此芯片作为电池监测系统的CPU 还体现在以下几个方面:
1.节能,节能已经成为现代电子设备设计的一个热点问题。当设备由二次电池来作为电源的时候,节能问题则变得更加突出和重要。本设计使用的DSP 由3.3V 电源供电,减小了控制器的损耗。芯片电源管理包括低功耗模式,能独立将外设器件转入低功耗模式。
2.16 通道输入的A/D 转换器。这一点对于多路采集子电路很有意义。可以直接将采集电路的输出接到DSP 的A/D 转换通道。而不必在DSP 外面再设A/D 转换电路。
3.40 个可单独编程或复用的输入输出引脚。可用于安全开关及其它外设电路的控制。
4.串行通信接口(SCI)和16 位串行外设接口模块(SPI)可以接监测系统的显示部分。
3 系统的硬件设计
系统的硬件设计主要包括电压采集电路、电流采集电路和温度采集电路设计。采集电路以TMS320LF2407A 为CPU。TMS320LF2407A 是TI 公司专为实时控制而设计的高性能16 位定点DSP 器件,指令周期为33ns,其内部集成了前端采样A/D 转换器和后端PWM 输出硬件,在满足系统实时性要求的同时可简化硬件电路设计。
3.1 电压采集电路设计
本设计以锂离子动力电池为管理对象。电池组由8 块3.6V 锂电池组成。每个电池单体的额定电压为3.6V 充满时端电压为4.25V。要求电压采集精度控制在1.5%以内。电池管理系统要求的最低采样频率为20ms。
系统采用线性光耦作为隔离和数据采集系统的信号传递采样器件,这样就将前端的每一节电池的电压隔离出来。将电池的大电压按一定比例缩小,以便将电池变化的电压值如实地反映给DSP。其后需经过多路开关进入微处理器进行计算。光耦隔离的优点是速度快(光耦的速度是微秒级,远小于继电器的毫秒级),实时性要好。另外光耦两端的信号在电气连接上完全隔离,不存在任何关系,所以即使在光耦的输出端发生短路也不会给电池的使用造成任何影响。光耦将电压信号转换为电流信号进行采集,解决了共地问题。与电压传感器相比,光耦的性价比更高。
在选择器件的时候,我们考虑到经济性和实用性,光电祸合器选择了日本东芝公司生产的TLP521,运算放大器选择的双运算放大器TL082。
电池单体的电压测量电路如下图3-1 所示。
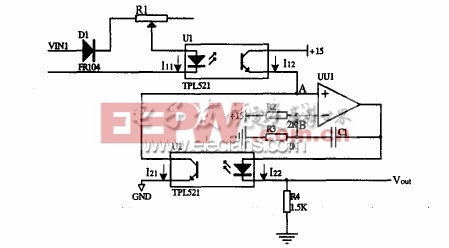
图3-1 单体电池电压采集电路。
VIN 即电池单体电压,经过R1与光耦中的发光二极管形成回路,将电压信号(VIN)转换为电流信号( I11)。I11与I21有一定比例关系I11∝ I21。UU1 在这里作为比较器使用。当A点电压Va大于B 点电压Vb,UU1 就输出高一些的电压值,当A 点电压Va低于B 点电压Vb,UU1 就输出低一些的电压值。在整个电压采样电路中,比较器形成一个反馈。使A、B 两点的电压值保持一致。这样做的目的是B 点电压显然是15M2=7.5v, Va= Vb =7.5v,说明上下两个光耦中的三极管导通情况一样。这样,三极管的导通情况是受控于发光二极管的。可知当I21= I22时, I11= I22。这样,VINM= I11= I22= VoutMR4。可见Vout 与VIN 成比例。
3.2 电流采集电路设计
锂离子动力电池组所有电池单体串连组成整个供电系统,只设置一个电流采集点即可。
本文采用霍尔电流传感器采集。
霍尔电流传感器的原理图如3-2。被测电流In流过导体产生的磁场,由通过霍尔元件输出信号控制的补偿电流Im流过次级线圈产生的磁场补偿,当原边与副边的磁场达到平衡时其补偿电流Im即可精确反映原边电流In值。
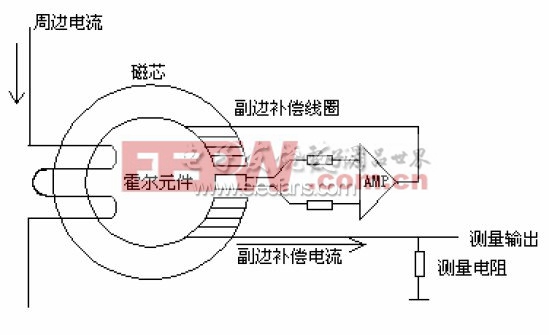
图3-2 霍尔电流传感器原理图。












评论