
电流模式BUCK型驱动电路斜率补偿研究
摘要:介绍了电流模式开关电源的原理和特点。针对电流模式下会引起振荡的现象,分析了系统不稳定的原因,论述了占空比、电感平均电流与系统不稳定之间的关系。并论述了通过斜率补偿解决系统振荡的基本原理。设计了一款基于max16834驱动芯片的高边降压型电路,给出了斜率补偿设计实例。实验结果表明,斜率补偿增强了系统的抗干扰性并提高了系统的稳定性。
关健词:开关电源;电流模式;斜率补偿;驱动电路
0 引言
与电压模式相比电流模式拓扑有两个反馈环。一个是检测输出电压的电压外环,一个是检测开关管电流且具有逐周期限流功能的电流内环。它具有动态响应快,增益带宽大,输出电感小等优点。但电流模式仍存在问题,电流内环只检测电感峰值电流,不能保证电感平均电流恒定。当输入电压变化引起电感输出平均电流变化时,负载电压跟随变化,产生振荡。同时当占空比大于0.5时,电感电流初始扰动会随着开关周期累积,虽最终衰减但形成振荡。针对电流模式的振荡问题,论述了斜率补偿原理,通过斜率补偿改善不稳定现象。以max16834为控制芯片,设计了高边降压电路并给出斜率补偿计算方法。
1 电流模式原理
由图1可以看出,电流模式含有两个反馈环,包括由接收输出电压采样信号的误差放大器构成的电压外环和由接收初级峰值电流采样信号的PWM比较器构成的电流内环。导通时间由误差放大器的输出电压Vea与电流采样电阻Ri上的锯齿形电压经PWM比较器比较确定。
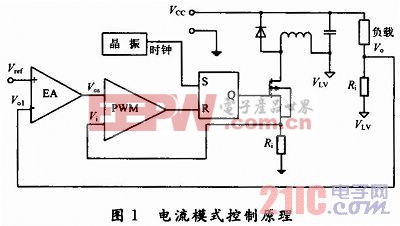
内部晶振产生时钟信号,每次出现时钟脉冲触发器就置位使开关管导通。PWM比较器输出为高时,触发器复位,输出低电平开关管关断。即PWM比较器输出由低变高的时刻就是导通结束的时刻。PWM比较器将峰值采样电阻Ri上的锯齿形电压Vi和误差放大器EA的输出比较。当Vi与Vea相等时,PWM比较器输出由低变高,使触发器复位,触发器输出低电平,开关管关断。控制电路重复上述过程,产生一定的占空比,经过电压与电流的双环控制得到稳定的输出Vo。
2 电流模式产生振荡的原因
2.1 输入电压变化引起振荡
从电流模式的控制原理可知直流负载电流是电感电流的平均值。而电流采样电阻Ri只能检测开关管电流的峰值相当于恒定了电感电流的峰值,不能保证电感电流的平均值恒定。电感平均电流变化会引起输出电压Vo变化,由图1可知Vo变化引起Vea变化。而Vi不变,Vea与Vi经过PWM比较器导致输出Vo再次变化,这样反复的调整造成输出电压的振荡。
Vo变化由电感平均电流变化引起,电感平均电流可如下简单推算:
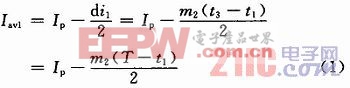
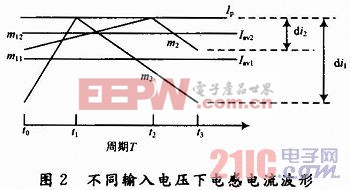
式中:Iav1Iav2。由输出电压决定,m2为定值。因此从式(1)可知导通时间越长,电感平均电流越高。导通时间由输入电压确定,输入电压越大导通时间越短,即直流输入电压低时的电感平均电流值比输入高时的平均值大。当输入电压下降时电流内环拉长导通时间,电压外环缩短导通时间,两者共同作用形成振荡。如图2所示。

DIY机械键盘相关社区:机械键盘DIY
基尔霍夫电流相关文章:基尔霍夫电流定律
比较器相关文章:比较器工作原理
光伏发电相关文章:光伏发电原理 晶振相关文章:晶振原理







评论